
偉創(chuàng)AC80變頻器動力放線架調試指導
深圳市偉創(chuàng)電氣有限公司
摘要: 本文介紹了偉創(chuàng)變頻器AC80矢量型變頻器在線纜行業(yè)的一些優(yōu)勢,以及在動力放線架的調試作業(yè)指導。
Abstract:
Key words :
摘要:本文介紹了偉創(chuàng)變頻器AC80矢量型變頻器在線纜行業(yè)的一些優(yōu)勢,以及在動力放線架的調試作業(yè)指導。
1 、 引言
線纜行業(yè)目前正在向產品多樣化、生產自動化等更高的技術層次發(fā)展。在線纜行業(yè)中,應用最廣泛的就是放線架,而動力放線架又是其中技術含量較高的一種設備。動力放線架一般要求變頻器含有PID調節(jié)的功能,并且PID是可以雙向控制的。目前在行業(yè)應用中偉創(chuàng)AC80矢量變頻器可以不加任何輔助配件就可實現這樣的要求。
2 、工藝介紹
動力放線架作為多種設備的最前端,在線纜行業(yè)中有著廣泛的應用。一般來說,對動力放線架的要求有以下幾點:
a、在引取速度加快時,放線速度也跟著引取速度快速加速;
b、在引取速度減速時,放線速度也跟著引取速度減慢;
c、當穩(wěn)定運行在某個速度時,放線架的擺桿要穩(wěn)定;
d、當出現松線時,收線速度也跟著松線速度快速加速;
e、當出現斷線時, 要求放線盤立即停止運轉;
以上的幾點要求全部由變頻器的PID功能完成,而且要求變頻器對速度的反映要相當靈敏。
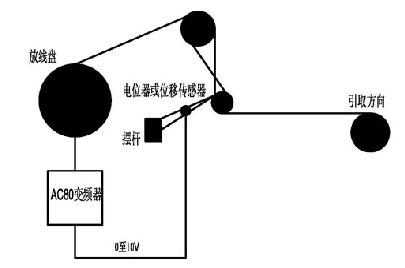
動力放線架結構示意圖
3 、PID介紹
針對動力放線架對變頻器的要求,偉創(chuàng)AC80變頻器在過程PID控制模式上,給定的參考值是以工程量考慮的,其中工程單位很多,且其PID功能能夠實現雙向輸出,這樣通過PID的雙向輸出就能輕松實現電機正反轉控制。
變頻器頻率控制模式采用閉環(huán)過程控制方式,主給定頻率來自變頻器本身PID當前預置頻率,反饋信號來自擺桿所連接的電位器或位移傳感器信號0-10VDC,這樣可以實現PID的雙向作用。加減速時間為1s左右。
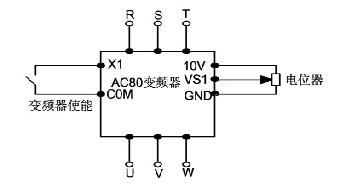
動力放線架接線圖(1)
4、調試
偉創(chuàng)AC80變頻器在接線和調試方面都是很方便的。調試中應該注意的問題:
a、選擇過程PID控制之前運行時,一定要先進行自整定操作,以使變頻器自動識別電動機的等效參數,這樣變頻器的控制才能
更準確、更迅速;
更準確、更迅速;
b、PID的反饋特性選擇為正特性;
c、當動力放線架有抱閘裝置時,停機方式請選擇自由停車;
d、偉創(chuàng)AC80變頻器在過程PID控制時給定是以工程量為單位的,本事例是以“%”為單位的,這樣就很方便的將擺桿最大位置
設定為100%(對應于擺桿電位計10VDC), 調試的關鍵在于找到擺桿穩(wěn)定工作的點,然后將這點所在的位置定義為PID的給定;
設定為100%(對應于擺桿電位計10VDC), 調試的關鍵在于找到擺桿穩(wěn)定工作的點,然后將這點所在的位置定義為PID的給定;
AC80矢量型變頻器在動力放線架上使用時,參數設置如下(僅供參考):

5 、PID參數調試指導
在實際應用中,偉創(chuàng)AC80變頻器對速度的響應非常靈敏,在快速速度跟蹤和松線反向收線兩方面表現非常出色,完全滿足客戶的需求。
PID調整方法:
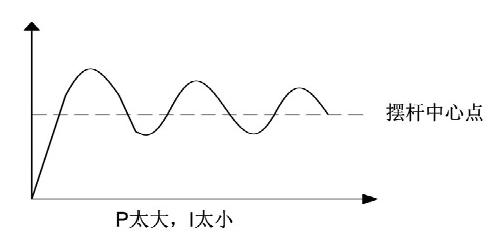
擺桿在中心點附近來回擺動,不能停止。調FB.08,FB.09。
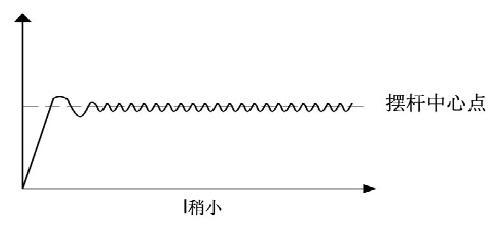
擺桿在中心點稍稍來回擺動,不能停止。調FB.09。
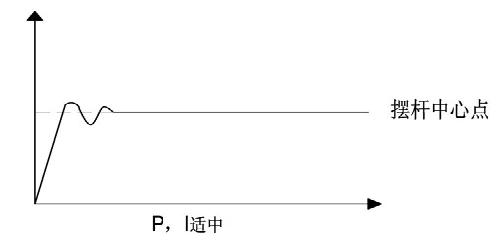
擺桿在中心點停止擺動或擺動很小

當FB.26=15%時,如上圖所示擺桿到達虛線部分時啟用第二段PID調節(jié)范圍,調整參數FB.23,FB.24時有效。
1、PID調試一般原則 :
a、在輸出不振蕩時,增大比例增益P;
b、在輸出不振蕩時,減小積分時間常數i;
c、在輸出不振蕩時,增大微分時間常數d。
2、一般步驟:
a、確定比例增益P
確定比例增益P 時,首先去掉PID的積分項和微分項,一般是令i=0、d=0(具體見PID的參數設定說明),使PID為純比例調節(jié)。輸入設定為系統(tǒng)允許的最大值的60%~70%,由0逐漸加大比例增益P,直至系統(tǒng)出現振蕩;再反過來,從此時的比例增益P逐漸減小,直至系統(tǒng)振蕩消失,記錄此時的比例增益P,設定PID的比例增益P為當前值的60%~70%。比例增益P調試完成。
b、確定積分時間常數i
比例增益P確定后,設定一個較大的積分時間常數i的初值,然后逐漸減小Ti,直至系統(tǒng)出現振蕩,之后在反過來,逐漸加大i,直至系統(tǒng)振蕩消失。記錄此時的i,設定PID的積分時間常數i為當前值的150%~180%。積分時間常數i調試完成。
c、確定微分時間常數d
微分時間常數d一般不用設定,為0即可。若要設定,與確定 P和T的方法相同,取不振蕩時的30%。
3、PID常用口訣:
參數整定找最佳,從小到大順序查;先是比例后積分,最后再把微分加;
曲線振蕩很頻繁,比例度盤要放大;曲線漂浮繞大灣,比例度盤往小扳;
曲線偏離回復慢,積分時間往下降;曲線波動周期長,積分時間再加長;
曲線振蕩頻率快,先把微分降下來;動差大來波動慢,微分時間應加長;
理想曲線兩個波,前高后低4比1;一看二調多分析,調節(jié)質量不會低。
此內容為AET網站原創(chuàng),未經授權禁止轉載。