0 引言
隨著新材料市場的需求, 各種用于新型合金材料表面處理的新工藝和與之相適應的電源技術(shù)也得到了迅猛發(fā)展。這些新工藝往往對電源的輸出波形有特殊要求,且在高壓、大電流的大功率輸出工況下要求電源的主要參數(shù)能夠隨著工藝過程的進展大范圍地連續(xù)調(diào)節(jié), 這不僅給電源主電路的設計帶來了相當?shù)碾y度, 同時對電源的控制系統(tǒng)" title="控制系統(tǒng)">控制系統(tǒng)設計也提出了更高的要求。目前多數(shù)的大功率特種脈沖電源" title="脈沖電源">脈沖電源是由高性能的單片機或DSP (數(shù)字信號處理器) 構(gòu)成其控制系統(tǒng)。文章介紹了一種基于新型工業(yè)控制機PCC 的電源控制器設計和實現(xiàn)方法。
1 電源系統(tǒng)" title="電源系統(tǒng)">電源系統(tǒng)組成及主要技術(shù)指標
合金表面特種加工工藝要求大功率脈沖電源能夠提供大電流、高電壓的雙向不對稱脈沖, 同時電源的主要參數(shù)要隨著工藝過程中負載的變化而大范圍地連續(xù)調(diào)節(jié), 這就要求電源能適應工藝曲線的變化給出最佳的控制規(guī)律[1 ] 。電源主要技術(shù)參數(shù)為: ①供電電源: 50 Hz , 380 V ; ②輸出平均電流: 0~240 A 連續(xù)可調(diào)" title="連續(xù)可調(diào)">連續(xù)可調(diào); ③輸出峰值電流: 0~1 500A連續(xù)可調(diào); ④輸出峰值電壓0~800 V 連續(xù)可調(diào); ⑤換向頻率0~200 Hz 連續(xù)可調(diào); ⑥脈沖工作頻率: 0~5kHz 連續(xù)可調(diào); ⑦脈沖占空比" title="占空比">占空比: 5~95%連續(xù)可調(diào)。
電源系統(tǒng)硬件組成原理如圖1 所示。圖中, 全控整流電路實現(xiàn)調(diào)壓、移相調(diào)功, 其輸出經(jīng)濾波電路與PWM逆變電路的直流輸入端相連, 后者輸出電壓平均值隨整流電路的導通角α大小而改變。負載所需的脈沖工作頻率、占空比、脈沖寬度由PWM逆變電路變換, 經(jīng)尖峰抑制電路處理后供給負載。雙向脈沖采用非對稱矩形脈沖輸出波形, 且脈沖工作頻率和占空比是連續(xù)可調(diào)的, 以滿足不同加工工藝的需要。因此只要合理控制逆變電路中功率開關(guān)元件的通斷, 就可實現(xiàn)對頻率、換向比和占空比等參數(shù)的連續(xù)調(diào)節(jié)。
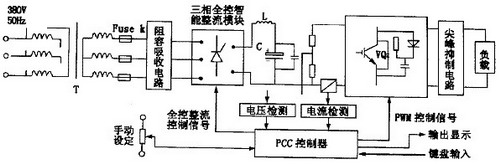
圖1 電源主電路及控制系統(tǒng)原理框圖
2 控制系統(tǒng)的硬件設計
2.1 PCC 控制系統(tǒng)簡介
PCC(可編程計算機控制器) 是集計算機、通訊和自動控制技術(shù)為一體的新型工業(yè)控制裝置,具備極高的可靠性、豐富的高級編程語言和函數(shù)庫, 其強大的功能、靈活的結(jié)構(gòu)和豐富的I/ O 模塊配置, 能夠勝任大型集散控制系統(tǒng)和復雜的過程控制。本項目所設計的脈沖電源控制系統(tǒng)采用奧地利B&R 公司的PP41(PCC 系列產(chǎn)品) , 是集人機面板與控制系統(tǒng)于一體的工控裝置。其CPU 是32 位的Motorola M68300 微處理器, 運算速度快, 并配有RS232/ RS485 接口、CAN 總線接口以及PCMCIA 插槽, 除自身集成10 個24VDC 的開關(guān)量輸入和8 個24VDC 的開關(guān)量輸出通道外還能選配6 個B&R2003 旋入模塊。用戶RAM 為700Kbyte 的SRAM, 系統(tǒng)PROM 為600 Kbyte 的Flash PROM, 用戶PROM 為114 Mbyte 的Flash PROM, 同時還可根據(jù)用戶的需要插入PCMCIA 卡以擴充存儲容量。PP41 具有內(nèi)部電壓監(jiān)控功能和防止軟件跑飛的看門狗。帶有用戶可自定義的小鍵盤和分辨率為QVGA (320 3 240 像素)的LCD , 且體積小便于安裝。鍵盤和液晶顯示器面板與主機間通過RS485 總線連接, 二者既可分離也可集成在一起安裝。PP41 對鍵盤、顯示、控制面板、看門狗等功能的高度集成以及豐富的函數(shù)庫省去了單片機開發(fā)中的許多工作量, 大大縮短了開發(fā)周期[2 ] ,其工業(yè)級的品質(zhì)保證了控制器的可靠性。根據(jù)控制系統(tǒng)的功能和要求設計的電源控制器如圖2 所示。
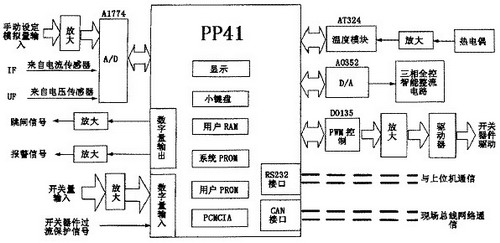
圖2 電源控制器的組成框圖
圖2 中模擬量輸入模塊AI774 有4 路微分輸入, 均為12bit 分辨率的0~20mA 的電流輸出方式, 可直接采集霍爾電壓、電流傳感器的檢測信號。而電壓控制信號的生成則采用雙通道12bit 分辨率的模擬量輸出模塊AO352 , 其0~10V 的電壓輸出方式即可直接連續(xù)調(diào)節(jié)三相全控智能整流模塊的電壓輸出。
PP41 控制器中集成了TPU (時間處理器) 來產(chǎn)生PWM信號, TPU 可以在不增加CPU 負擔的情況下實現(xiàn)脈沖計數(shù)、PWM 信號生成、頻率測量、步進電機的控制、同步數(shù)據(jù)通信、脈沖定位等功能。B&R 公司開發(fā)了TPU Code Linker (TPU 代碼鏈接器) , 可以在CPU 熱啟動時通過內(nèi)部模塊總線將代碼送入CPU 與TPU 之間的2Kbyte 的RAM, 之后只有TPU 有權(quán)直接訪問此存儲區(qū)并通過LTX函數(shù)來控制時間處理器的工作。
B&R 公司提供了許多具有TPU 功能的輸出模塊,PCC 系列中有專用的DO135 模塊可方便的產(chǎn)生PWM 信號, DO135 為4 路的數(shù)字量輸出模塊, 最大工作頻率可達到100 kHz。控制系統(tǒng)工作在PWM 方式下, 因此應用PCC 軟件庫提供的LTXdpwm ( ) 函數(shù)只需要設置PCC的數(shù)據(jù)字和控制字即可方便的連續(xù)調(diào)節(jié)頻率和占空比。PWM方式的開關(guān)由16 位計數(shù)器來控制, 計數(shù)達到65535 后隨即返回0并重新開始計數(shù), 控制PWM 開關(guān)的計數(shù)值即可調(diào)節(jié)占空比。PWM 信號由DO135 產(chǎn)生后即可供給功率開關(guān)器件的驅(qū)動電路。
2.2 模糊控制" title="模糊控制">模糊控制器設計
大功率脈沖電源已被廣泛地應用于許多工業(yè)領域中, 其控制算法通常采用常規(guī)PID 控制, 其算法簡單,魯棒性好, 可靠性高, 適用于負載性質(zhì)確定且負載變化范圍不大的場合。
由于文章涉及到的電源負載是隨著工藝過程的進行, 其性質(zhì)和大小均有較大范圍的變化, 很難建立其數(shù)學模型, 實踐證明采用常規(guī)PID 控制器難以達到理想的控制效果。
文章所設計的電源控制器, 其重要的控制功能之一就是在生產(chǎn)過程中當負載電流受工藝影響或當系統(tǒng)受到強干擾時負載電流發(fā)生突變(有時出現(xiàn)尖峰) , 或按工藝要求突加負載和突卸負載時, 能夠通過調(diào)節(jié)電壓, 迅速使電流恒定在設定的工藝曲線上。
為保證電源輸出電流為設定值, 控制系統(tǒng)采用電流閉環(huán)控制。脈沖電源輸出的電流經(jīng)霍爾傳感器反饋到微處理器中, 模糊控制器根據(jù)電流誤差及誤差的變化率按照模糊控制規(guī)則得到控制量Δu , 來控制電源系統(tǒng)的輸出電流。
模糊控制系統(tǒng)如圖3 所示。
Ii -手動設定電流值; Io -負載端輸出脈沖電流平均值

圖3 模糊控制原理框圖
其具體設計如下:
(1) 選擇模糊控制器的語言變量。模糊控制器的輸入語言變量選為手動設定電流值Ii 與實際負載端輸出脈沖電流平均值Io之間的差e = Io - Ii 及其變化率d e/ d t , 而其輸出語言變量為被控對象的控制量u 。
(2) 建立輸入語言變量誤差E、誤差變化EC 和輸出語言U 的賦值表。
設定E、EC 和U 為下列模糊子集:
E = EC = U = { NB NM NS 0 PS PM PB}
其中NB = 負大, NM = 負中, NS = 負小, 0 = 零, PS= 正小, PM = 正中, PB = 正大。根據(jù)馬達尼法, 設定E , EC 的論域為[ - 6 , + 6 ] , 并將其量化為13 個等級, U 的論域為[ - 7 , + 7 ] , 量化的等級為15 個,
E = EC = { - 6 , - 5 , - 4 , - 3 , - 2 , - 1 ,0 ,1 ,2 ,3 ,4 ,5 ,6}
U = { - 7 , - 6 , - 5 , - 4 , - 3 , - 2 , - 1 ,0 ,1 ,2 ,3 ,4 ,5 ,6 ,7}
(3) 選擇控制規(guī)則
用"IF A AND B THEN C"的模糊條件語句來描述, 該控制器把實際控制策略歸納為: IF E = NB AND
EC = NB THEN U = PB . . . . . . . . . 等條件語句, 控制規(guī)則表詳見文獻[3] 。
(4) 確定模糊推理算法和模糊判決方法, 建立模糊控制器查詢表。
采用的模糊推理算法是Mamdani"最小- 最大"推理法[4] , 模糊判決為重心法, 為了減少在線計算量,采用離線計算, 形成以觀測值和與之對應的控制值為內(nèi)容的模糊控制表。
在電源控制系統(tǒng)中, 電壓、電流均可以采用模糊控制的算法來增強控制系統(tǒng)的動態(tài)穩(wěn)定性,但生成的是在原先控制量基礎上的變化量Δu , 因此在實際的控制系統(tǒng)中的控制量為原先控制量u 與Δu 之和[5] 。在PCC 控制系統(tǒng)中, 我們將離線運算得到的模糊控制表以數(shù)組的形式輸入到存儲器中, 這樣當運行模糊控制子程序時, 模糊推理和判決的工作量就會相對減少。模糊控制程序如圖4 所示。

圖4 模糊控制程序流程圖
在實際電源系統(tǒng)中不允許發(fā)生大電流的階躍和沖擊。所以在實驗過程中設定平均電流為150 A , 對其施加幅值為30 A 的階躍試驗, 并用上位機監(jiān)控軟件完成數(shù)據(jù)采集及顯示, 圖中步長為20 ms。
實驗結(jié)果符合設計思想, 響應曲線超調(diào)小, 上升時間短, 動態(tài)性能好, 電源控制系統(tǒng)采用模糊控制算法取得了良好的控制效果。
上升時間tr = 480 s ; 超調(diào)量δ% = 419%
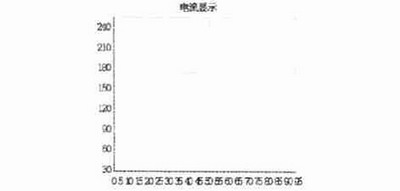
圖5 PCC 電源系統(tǒng)階躍響應示意圖
3 結(jié)束語
以PCC 作為大功率特種脈沖電源系統(tǒng)的核心控制器, 控制器硬件選用B&R 公司PCC 系列的PP41 , 其主要優(yōu)點是硬件模塊化和抗干擾能力強。采用高級語言ANSI C 作為PCC 的軟件編程語言, 開發(fā)的程序簡潔易讀, 可移植性強, 修改方便, 有與其硬件類似的模塊化結(jié)構(gòu)的特點。模糊控制算法的引進, 不僅保證了電源可工作于恒壓、恒流兩種工作方式下, 且使得電源控制系統(tǒng)的穩(wěn)態(tài)特性和動態(tài)品質(zhì)有了明顯的提高。
參考文獻:
[1 ] 吳小華, 張曉斌, 鄭先成. 模糊PID 控制器在中頻電源中的應用[J ] . 電力電子, 2002 , 8 (4) :56 - 58.
[2 ] 齊容. 可編程計算機控制器原理及應用[M] . 西安: 西北工業(yè)大學出版社, 2002.
[3 ] 陶永華. 新型PID 控制及其應用(第2 版) [M] . 北京: 機械工業(yè)出版社, 2002.
[4 ] 劉金琨. 先進PID 控制及其MATLAB 仿真[M] . 北京: 電子工業(yè)出版社, 2003.
[5 ] 吳志強. 模糊控制系統(tǒng)穩(wěn)定性的分析和綜合[J] . 計算機自動測量與控制, 2001 , 9(4) :19-21.
基金項目:本課題受國家"十五"科技攻關(guān)重大專題資助(2001BA311A06-3)
