應(yīng)用領(lǐng)域:
采用計(jì)算機(jī)視覺(jué)技術(shù)解決大功率晶體管在封裝過(guò)程中位置的閉環(huán)控制問(wèn)題,。晶圓在切割與拉伸過(guò)程中會(huì)產(chǎn)生間隔不一致的問(wèn)題,而平臺(tái)的X,、Y移動(dòng)量卻是固定,,這樣一來(lái)就會(huì)造成機(jī)械手只吸取到晶片的邊緣或根本吸取不到晶片。為了知道晶片的中心位置,,目前采用機(jī)器視覺(jué)的定位技術(shù)是一種可靠與經(jīng)濟(jì)的方案,。
實(shí)現(xiàn)過(guò)程:
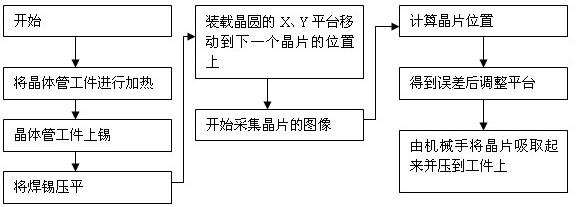
使用機(jī)械視覺(jué)技術(shù)就要使用到CCD、光源,、圖像采集卡,、計(jì)算機(jī)等設(shè)備。CCD與光源固定在晶圓的上方,,高度要根據(jù)鏡頭與放大倍數(shù)來(lái)調(diào)節(jié),,一旦設(shè)置好就鎖緊它。為了提高視覺(jué)定位精度視野設(shè)置在10X10的范圍內(nèi),,在達(dá)到精度的情況下同時(shí)要兼顧它的經(jīng)濟(jì)性,,可選用44M像素相機(jī)與采集卡,那么在X方向與Y方向的分辨率都達(dá)到0.01mm的精度要求,。軟件使用具有自主知識(shí)產(chǎn)權(quán)的ckvision視覺(jué)系統(tǒng)來(lái)開(kāi)發(fā)視覺(jué)定位軟件,。ckvision具有豐富的基本功能和多種高級(jí)功能,高級(jí)功能都是在基本功能的基礎(chǔ)上開(kāi)發(fā)出來(lái)的,,同樣晶片定位功能也是在基本功能的基礎(chǔ)上開(kāi)發(fā)出來(lái),,它首先調(diào)用畫圖工具選定好ROI的范圍,然后調(diào)用CK_IcSearch()函數(shù)找到晶片的位置,。
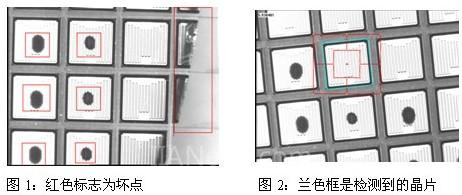
除了要檢測(cè)它的位置還要判斷晶片的好與壞,。晶圓在成型后需要經(jīng)過(guò)電檢測(cè)判斷它好壞,壞的晶片需要打上標(biāo)志點(diǎn),,壞的晶片還包括晶圓邊緣不完整的晶片,。在此選取需要檢測(cè)的ROI圖像,采用了平均直方圖功能,,只要底于預(yù)制的閥值就判斷是壞品,。