
1 問(wèn)題的提出
通過(guò)采用聚焦極好的千瓦級(jí)CO2激光可大大提高焊接的速度。與此有關(guān)的對(duì)傳統(tǒng)激光加工機(jī)動(dòng)力學(xué)方面的高要求只有少數(shù)激光裝置能滿足。尤其是嚴(yán)重彎曲的軌道運(yùn)動(dòng),如小尺寸部件結(jié)構(gòu)的加工更成問(wèn)題。
即使是動(dòng)力學(xué)最佳的激光機(jī),如以線性運(yùn)作的二維切割設(shè)備在切割10 mm 直徑的圓結(jié)構(gòu)時(shí)也只能得到約20 m/min 的軌道速度。曲率半徑較小的軌道結(jié)構(gòu)只能降低精度或減小速度進(jìn)行。
2 解決的途徑
替代和補(bǔ)充傳統(tǒng)激光加工機(jī)普通的卡笛兒式或交鏈?zhǔn)捷S系的方法是采用使激光束在工件上移動(dòng)的光束偏轉(zhuǎn)系統(tǒng)。用該系統(tǒng)替代常用焊接和切割頭時(shí),操作系統(tǒng)(龍門(mén)吊或工業(yè)機(jī)械手)只能承擔(dān)對(duì)部件的基本定位和加工頭的作用,實(shí)際操作進(jìn)量由加工頭中轉(zhuǎn)動(dòng)的光束偏轉(zhuǎn)系統(tǒng)反射鏡來(lái)實(shí)現(xiàn)。由于該偏振鏡質(zhì)量輕,這種光束轉(zhuǎn)動(dòng)即使在很高的推進(jìn)速度(600 m/min) 時(shí)也特別精確。
這種光束偏轉(zhuǎn)系統(tǒng)目前主要用于激光標(biāo)記或低激光功率(幾百瓦)的焊接。這里激光束通過(guò)透鏡聚焦,由兩個(gè)相互垂直、通過(guò)電流計(jì)掃描器驅(qū)動(dòng)的偏振鏡移動(dòng)光束聚焦在工件上。偏轉(zhuǎn)系統(tǒng)的結(jié)構(gòu)和操作原理不僅確定了偏轉(zhuǎn)系統(tǒng)與部件間的距離,還確定了最大可達(dá)工作范圍。因?yàn)榻裹c(diǎn)在一個(gè)環(huán)形面上移動(dòng),這在原理上決定了像差的出現(xiàn)。這與待加工外形的尺寸,即所需激光束的偏轉(zhuǎn)角有關(guān),可能限制使用范圍。采用平場(chǎng)透鏡可避免這種像差,可在確定的工作場(chǎng)所用恒定光束強(qiáng)度加工平面工件。
由于采用透鏡光學(xué)件和掃描反射鏡,商用光束偏轉(zhuǎn)系統(tǒng)的供應(yīng)商將可傳輸?shù)募す夤β氏拗圃趲装偻撸鴮?duì)于機(jī)械制造中通常的毫米級(jí)焊深來(lái)說(shuō),則需幾干瓦功率的激光。
3 高功率激光的光束偏轉(zhuǎn)系統(tǒng)
夫朗和費(fèi)材料-射柬技術(shù)研究所為此研制一種光束偏轉(zhuǎn)系統(tǒng),用于激光功率高至4kW 的CO2 激光加工時(shí)。這有助于將高技術(shù)可實(shí)現(xiàn)的加工進(jìn)給速度化為工業(yè)應(yīng)用。
加工系統(tǒng)由具有電流計(jì)掃描器的光束偏轉(zhuǎn)單元和具有拋物面鏡的聚焦系統(tǒng)組成(圖1),該拋物面鏡可以通過(guò)附加反射鏡完成動(dòng)態(tài)焦點(diǎn)跟蹤。于此產(chǎn)生一種硬件基本塊形成模件式PC卡的控制和特種加工任務(wù)的控制程序,該系統(tǒng)還采用光束監(jiān)控附加部件加以完善。此外,為了傳輸高功率激光,對(duì)所有光學(xué)部件都進(jìn)行冷卻。
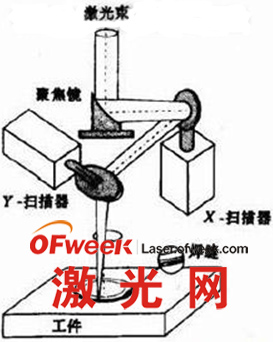
圖1 激光焊接用光束偏轉(zhuǎn)系統(tǒng)原理圖
4 應(yīng)用實(shí)例
替代軸運(yùn)動(dòng)系統(tǒng)的一個(gè)例子是用一維光束偏轉(zhuǎn)的小部件激光點(diǎn)焊,這里激光功率和脈沖序列同時(shí)得到控制。自1977 年以來(lái)工業(yè)部門(mén)流行的加工中已實(shí)現(xiàn)500 ms 內(nèi)16個(gè)焊接點(diǎn)。于是在一個(gè)多站加工臺(tái)上可將8個(gè)圓形彎曲板條焊成一個(gè)環(huán)(圖2) 。每年這類焊件數(shù)約2000 萬(wàn)。
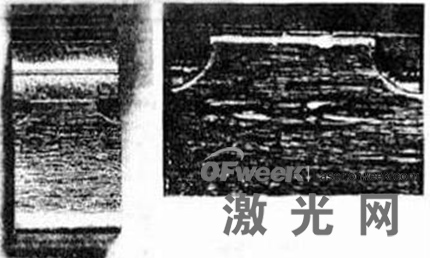
圖2 用一維光束偏轉(zhuǎn)系統(tǒng)和可觸發(fā)控制激光功率產(chǎn)生的臺(tái)階式焊縫,焊速為5m/min

圖3 用二維光束偏轉(zhuǎn)系統(tǒng)和可控激光功率將小管焊入孔板,焊速為10m/min
另一可望成功的應(yīng)用領(lǐng)域是將螺帽、管腳、管子等焊入組合部件。圖3 示出將直徑為2.5 mm 的小管焊入孔板。焊接時(shí)間約100ms。這里,需要用傳感器控制確定下一待焊管的位置,以免由于位置公差使整個(gè)部件扭曲。
原則上,圖形加工的軌跡,尤其是加工小直徑時(shí),用其他系統(tǒng)也可達(dá)到,但采用光束偏轉(zhuǎn)系統(tǒng)可以幾乎是無(wú)限制地實(shí)現(xiàn)加工形狀的多樣化。因?yàn)閷?duì)于光束偏轉(zhuǎn)系統(tǒng)來(lái)說(shuō),與傳統(tǒng)運(yùn)動(dòng)系統(tǒng)的不同在于,在焊縫產(chǎn)生的過(guò)程中要保持恒定的進(jìn)給速度,待加工的幾何尺寸不起重要作用,相反加工頭與部件的精確定位倒是重要的。