
震動" title="震動">震動信號分析作為戰(zhàn)場傳感偵察系統(tǒng)的一個重要組成部分,,主要探測地面運動目標的震動信號,,對其信號實時" title="實時">實時分析和處理,并給出相應(yīng)的識別信號,,以判別震動目標類型,、數(shù)量等信息。為了得到良好的震動信號,,并能初步分析處理該信號,,給出了一種基于DSP" title="DSP">DSP信號的實時震動信號分析處理系統(tǒng)設(shè)計方案。
系統(tǒng)硬件設(shè)計
2.1 震動傳感器信號檢測單元設(shè)計
系統(tǒng)傳感器采用EG& GICSENSORS公司的3028型加速度傳感器,。由于該傳感器的輸出為差分輸出,,所以采用一個儀表放大器將其差分輸出轉(zhuǎn)換為單輸出;又由于該傳感器具有 16.8 mV的零位輸出電壓,,因此第1級放大倍數(shù)應(yīng)盡可能小,,目標震動信號疊加在放大的零輸出電壓上可能產(chǎn)生飽和失真,即可能被削頂,,因此Rg1應(yīng)取得大一些,。在此Rg1=10 MΩ,這樣第1級放大倍數(shù)G1≈1,,于是傳感器的零輸出電壓幾乎未放大,,目標震動信號不至于由于其零輸出電壓的影響而失真。由于第1級放大電路的儀表放大器的輸出信號中仍疊加有傳感器的零位輸出電壓,,該電壓為直流或接近于直流的信號,,為避免其在后續(xù)電路中被放大,在第2級放大電路前需加一個高通濾波電路隔離該信號,。在此用RC二階高通濾波器消除零輸出電壓對后續(xù)目標信號放大的影響,。這里選取R=36 kΩ,C=1μF,,則此高通濾波器的截止頻率為:

第2級REF接1.5 V參考電壓,,調(diào)節(jié)Rg2使輸出信號在滿量程時的輸出范圍在0~3 V之內(nèi),以便DSP的A/D轉(zhuǎn)換器采集數(shù)據(jù),,傳感器的調(diào)理電路如圖1所示,。

2.2 DSP單元設(shè)計
數(shù)字信號處理器采用TI公司的TMS320F2812,,該器件是一款用于控制的高性能,、多功能,、高性價比的32位定點DSP,最高可在150 MHz主頻下工作,,可兼顧控制和快速運算的雙重功能,。數(shù)據(jù)存儲模塊采用一個8 MB的串口FlashM25P80。
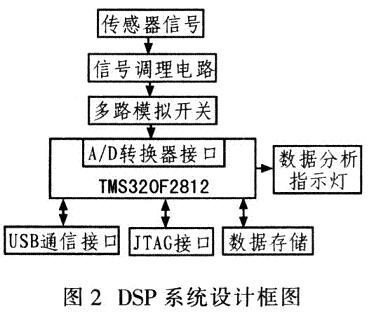
DSP實時震動信號分析和處理系統(tǒng)主要由震動傳感器,、前置放大電路,、濾波電路、DSP數(shù)據(jù)采集分析模塊以及存儲模塊組成,。圖2為系統(tǒng)設(shè)計框圖,。

系統(tǒng)軟件設(shè)計
3.1 信號采集預處理
信號采集后為了能夠在DSP中快速處理,需要進行去均值與歸一化,,這樣可有效限制信號幅值,,并將信號統(tǒng)一到同一數(shù)量級。有助于計算開方時需要利用解一元二次方程的算法,;計算除法時,,為了減少機器周期的占用,需要將除法轉(zhuǎn)換為乘法,。去均值與歸一化處理的計算方法可參見文獻,。
3.2 程序流程
圖4為系統(tǒng)軟件主程序流程。首先對系統(tǒng)初始化,,看門狗定時復位,,啟動A/D轉(zhuǎn)換器采集數(shù)據(jù),主程序進入死循環(huán),;當A/D轉(zhuǎn)換器轉(zhuǎn)換完畢,,進入中斷子程序,讀取數(shù)據(jù),,并將數(shù)據(jù)存人數(shù)組進行數(shù)據(jù)的處理和緩存,。

3.3 DSP主程序設(shè)計
主程序先初始化系統(tǒng)控制寄存器,初始化PIE向量表禁止和清除所有CPU中斷,,采用TMS320F2812片內(nèi)集成的A/D轉(zhuǎn)換器采集數(shù)據(jù),。程序首先對 A/D轉(zhuǎn)換器初始化,用DSP內(nèi)的EVA事件管理器產(chǎn)生SEQ1A/D轉(zhuǎn)換啟動信號,,首先設(shè)置T1比較值為0x0080,,設(shè)置周期寄存器為0xFFFF使能事件管理器A的EVASOC,使能定時器1比較遞增計數(shù)模式,,DSP事件管理器EVA的配置程序如下:

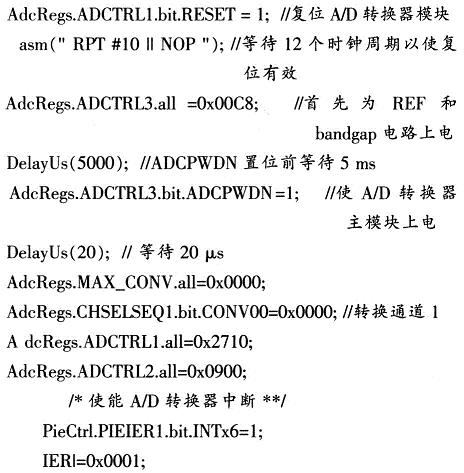
EVA為SEQ1產(chǎn)生ADC SOC信號后,,開始對通道1轉(zhuǎn)換,,轉(zhuǎn)換結(jié)束后,A/D轉(zhuǎn)換產(chǎn)生中斷信號并調(diào)用中斷處理程序讀取ADCRESULTO中的值存人數(shù)組,。當采滿512個點后將程序跳轉(zhuǎn)到數(shù)據(jù)處理程序,,調(diào)用FIR和FFT子程序,其中DSP A/D轉(zhuǎn)換器初始化程序代碼為:
DSP整個系統(tǒng)軟件采用C語言和匯編語言混合編程,,中斷函數(shù)模塊用匯編語言,,可提高程序的效率,F(xiàn)FT和FIR數(shù)字濾波運算主體用混編語言編寫,,可從TI網(wǎng)站下載,。
實驗結(jié)果
為了檢驗系統(tǒng)的實際應(yīng)用能力,將該系統(tǒng)在震動臺上進行實驗,,將3028型傳感器固定在激震臺上,,用激震臺分別模擬坦克、卡車和人員3種震動信號,,這3種信號各取20組用于該系統(tǒng)實驗,,根據(jù)實驗輸出信號判斷識別的正確率,在震動臺達到穩(wěn)定后DSP的解算時間均小于1 s,。DSP解算識別結(jié)果如表1所示,。
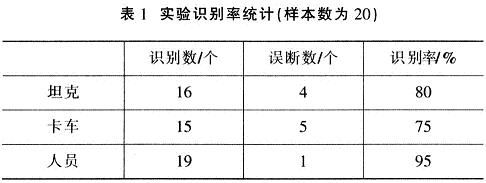
由實驗結(jié)果看出,該系統(tǒng)能夠?qū)δ繕说淖R別起到一定的輔助分析作用,,系統(tǒng)解算時間均小于1 s,,達到實時分析要求,系統(tǒng)能夠較好分析人員產(chǎn)生的震動信號,,而對坦克和車輛產(chǎn)生的震動信號分析結(jié)果較差,,這主要是由于坦克和車輛產(chǎn)生的震動信號特征較為相似,單純從震動信號的頻率和強度區(qū)分難度較大,;另外由于震動臺是磁激勵式的,,對外有較強的電磁輻射,會對整個系統(tǒng)產(chǎn)生干擾,,因此,,后續(xù)實驗需采取屏蔽電磁干擾的措施,震動信號分析算法還需進一步提高,。