
摘要:設(shè)計(jì)一款基于WinCE操作系統(tǒng)的智能車載儀表,通過CAN總線接收汽車各個(gè)部件的ECU的信息,并將其顯示在液晶顯示屏中。以ARM9內(nèi)核的S3C2440微處理器為核心,設(shè)計(jì)了外圍硬件以及CAN總線在WinCE中的底層驅(qū)動和上位應(yīng)用程序。
關(guān)鍵詞:嵌入式應(yīng)用;智能車載儀表;WinCE;CAN總線
引言
隨著高性能電子顯示技術(shù)的發(fā)展,汽車儀表電子化的程度越來越高。國內(nèi)外已開發(fā)出了多功能全電子顯示儀表、平視顯示儀表、汽車導(dǎo)航系統(tǒng)、行車記錄儀等高技術(shù)產(chǎn)品。未來,車用電子化嵌入式儀表具有以下優(yōu)點(diǎn):提供大量復(fù)雜的信息,使汽車的電子控制程度越來越高;滿足小型、輕量化的要求,使有限的駕駛空間更人性化;高精度和高可靠性實(shí)現(xiàn)汽車儀表的電子化,降低了故障的發(fā)生率;設(shè)有在線故障診斷系統(tǒng),一旦汽車發(fā)生故障,可以找到故障來源,方便維修;外形設(shè)計(jì)自由度高,汽車儀表盤造型美觀。基于以上優(yōu)點(diǎn),汽車會越來越多地采用各種用途的電子化儀表。造型新穎、功能強(qiáng)大的嵌入式電子化儀表將是今后車用儀表的發(fā)展趨勢和潮流。
1 智能車載儀表系統(tǒng)結(jié)構(gòu)
本智能車載儀表擁有大多數(shù)傳統(tǒng)車載儀表所擁有的功能,駕駛員可以通過車載儀表的顯示界面獲取當(dāng)前汽車的狀態(tài)信息,例如車速、油壓、油溫、水溫、機(jī)油壓力或者電瓶電量。
傳統(tǒng)車輛儀表直接與車輛的傳感器相連,儀表系統(tǒng)經(jīng)由傳感器的模擬量得到汽車當(dāng)前狀態(tài),精確性不高。本文設(shè)計(jì)的智能車載儀表并不是簡單地與傳感器相連,而是通過CAN控制器將整車連接成一個(gè)網(wǎng)絡(luò)結(jié)構(gòu)。車輛部件配以CAN控制器,通過雙絞線將車輛部件連接起來形成一個(gè)網(wǎng)絡(luò)體系,實(shí)現(xiàn)部件的電子化。同時(shí),車載儀表和汽車部件的電子化也提高了汽車的精準(zhǔn)度和可靠性,降低故障發(fā)生率。
車載智能儀表主要分為基于S3C2440處理器的硬件系統(tǒng)和WinCE環(huán)境下的軟件系統(tǒng)兩大部分。硬件系統(tǒng)為整個(gè)控制系統(tǒng)提供基礎(chǔ),負(fù)責(zé)CAN總線通信。軟件系統(tǒng)提供CAN總線的硬件驅(qū)動以及在WinCE下的儀表上位應(yīng)用程序。
2 硬件設(shè)計(jì)
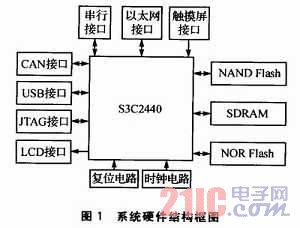
硬件系統(tǒng)以S3C2440為核心,RAM內(nèi)存、NOR Flash和NAND Flash作為存儲介質(zhì),擴(kuò)展部分外圍設(shè)備以負(fù)責(zé)系統(tǒng)信息的輸入與輸出,如CAN總線通信單元、LCD顯示、觸摸屏、通用串行口、USB設(shè)備、以太網(wǎng)接口等。系統(tǒng)硬件結(jié)構(gòu)如圖1所示。
在眾多接口中,CAN總線通信單元是在整車通信過程中的關(guān)鍵部分。在汽車的各個(gè)重要部件中,配置相應(yīng)的CAN控制單元,由雙絞線將各個(gè)CAN總線控制單元連接起來。汽車的各個(gè)部件將該部件的當(dāng)前狀態(tài)信息由CAN控制單元發(fā)送出去,經(jīng)雙絞線發(fā)送到智能車載儀表的CAN單元當(dāng)中,經(jīng)過系統(tǒng)的CAN接口將數(shù)據(jù)發(fā)送到系統(tǒng)中。車載儀表系統(tǒng)得到數(shù)據(jù)后,經(jīng)過數(shù)據(jù)處理得到汽車部件的當(dāng)前狀態(tài)信息。
CAN總線接口電路如圖2所示。采用Microchip公司的CAN總線控制器MCP2515。MCP2515完全支持CAN 2.OA/B技術(shù)規(guī)范,速度達(dá)到1Mbps;SPI的接口標(biāo)準(zhǔn)使得它與S3C2440的連接更加簡單;能發(fā)送和接收標(biāo)準(zhǔn)和擴(kuò)展數(shù)據(jù)幀以及遠(yuǎn)程幀;自帶2個(gè)驗(yàn)收屏蔽寄存器和6個(gè)驗(yàn)收濾波寄存器,可以過濾掉不想要的報(bào)文,減少了微處理器的開銷。CAN總線收發(fā)器采用TJA1050,該器件提供了CAN控制器與物理總線之間的接口以及對CAN總線的差動發(fā)送和接收功能。
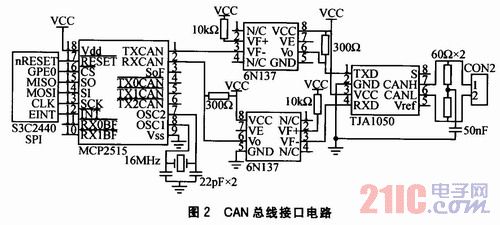
為了增強(qiáng)CAN總線節(jié)點(diǎn)的抗干擾能力,提高系統(tǒng)的穩(wěn)定性,在CAN控制器與CAN收發(fā)器之間加入了光耦隔離器6N137,而不是使TXCAN和RX-CAN端直接與收發(fā)器相連,這樣就實(shí)現(xiàn)了總線上各CAN節(jié)點(diǎn)之間的電氣隔離。同時(shí),這也解決了MCP2515與TJA1050之間電平兼容的問題,還可以抑制CAN網(wǎng)絡(luò)中的尖峰脈沖及噪聲干擾。光耦部分電路所采用的兩個(gè)電源必須完全隔離,否則也就失去了意義。電源的隔離可以采用小功率的電源隔離模塊或者多帶5 V隔離輸出的開關(guān)電源模塊實(shí)現(xiàn)。這些部分雖然增加了接口電路的復(fù)雜性,但是卻提高了節(jié)點(diǎn)的穩(wěn)定性和安全性。
在CAN接口處,CAN通信線上的2個(gè)60Ω電阻(總計(jì)120 Ω),起到增大負(fù)載、減少回波反射作用,是一種阻抗匹配的補(bǔ)救措施。2個(gè)60 Ω的中間部分與地端之間連接一個(gè)電容以抗干擾。
3 軟件設(shè)計(jì)
軟件的整體環(huán)境為winCE編程環(huán)境。針對本車載智能儀表硬件系統(tǒng)定制相應(yīng)的WinCE操作系統(tǒng),實(shí)現(xiàn)對硬件的驅(qū)動。再編寫應(yīng)用程序,通過對應(yīng)用程序的具體操作實(shí)現(xiàn)對系統(tǒng)硬件的操作,即實(shí)現(xiàn)系統(tǒng)的功能。其中非常關(guān)鍵的是編寫CAN控制器的驅(qū)動。CAN驅(qū)動實(shí)現(xiàn)應(yīng)用軟件對CAN控制單元的操作,以及讀取CAN控制單元中的數(shù)據(jù)代碼。
3.1 系統(tǒng)開發(fā)和移植
嵌入式系統(tǒng)開發(fā)就是系統(tǒng)驅(qū)動層的設(shè)計(jì),其中最主要就是BSP的開發(fā)和調(diào)試。所以智能車載儀表底層驅(qū)動的開發(fā)就顯得尤為重要。
由于使用的是WinCE操作系統(tǒng),所以使用Platform Builder定制WinCE操作系統(tǒng)鏡像。在Platform Builder中,可以添加系統(tǒng)部分硬件(如液晶屏、RAM)的驅(qū)動,這些驅(qū)動已經(jīng)由微軟公司編寫好。然后啟動Bootloader,把鏡像文件下載到Flash存儲器中,并配置操作系統(tǒng)啟動文件boot.ini。
3.2 CAN總線驅(qū)動開發(fā)
由于CAN是外部設(shè)備,所以需要將CAN的驅(qū)動以流接口驅(qū)動方式編寫。流接口驅(qū)動函數(shù)被設(shè)計(jì)來與通常的文件系統(tǒng)API(如 Activate Dev-iee、ReadFile、WriteFile和IOControl等)緊密匹配,即流接口驅(qū)動在應(yīng)用程序中表現(xiàn)為一個(gè)系統(tǒng)文件,應(yīng)用程序通過對系統(tǒng)文件的特殊文件進(jìn)行操作從而完成對設(shè)備的操作。編寫流接口文件主要用到流接口函數(shù),也就是流接口驅(qū)動的入口點(diǎn),如XXX_Init、XXX_Read和XXX_Open等。這些流接口文件與相應(yīng)的API函數(shù)對應(yīng),使應(yīng)用程序由相應(yīng)的函數(shù)可以訪問到外部設(shè)備。
作為流接口驅(qū)動程序,CAN總線驅(qū)動程序也有一組標(biāo)準(zhǔn)函數(shù),可完成I/O操作。這些函數(shù)提供給WinCE操作系統(tǒng)內(nèi)核使用,它們都是流接口驅(qū)動程序的DLL文件。動態(tài)加載CAN總線驅(qū)動程序時(shí),系統(tǒng)要進(jìn)行注冊。CAN驅(qū)動程序注冊表信息:
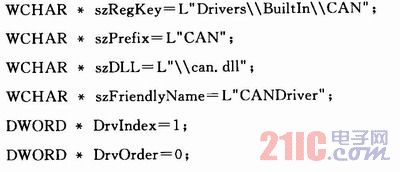
通過以上代碼完成注冊之后,調(diào)用ActivateDeviceEx()函數(shù)進(jìn)行加載驅(qū)動。
3.3 CAN總線驅(qū)動通信流程
CAN總線控制器驅(qū)動程序主要用于設(shè)置MCP2515的波特率、MCP2515的驗(yàn)收過濾器、CAN消息傳送模式和CAN收發(fā)數(shù)據(jù)方式。驅(qū)動程序是連接上位應(yīng)用程序和硬件的一個(gè)中間紐帶。智能車載儀表系統(tǒng)在EVC++環(huán)境下進(jìn)行CAN總線開發(fā)。
流式驅(qū)動以文件的方式打開函數(shù)CreateFile():驅(qū)動成功打開后,CreateFile()函數(shù)返回不為INVALID-HAN-DLE-VALUE的句柄,此句柄也是關(guān)閉驅(qū)動函數(shù)Close-Handle()的參數(shù)。CAN設(shè)置函數(shù)DeviceIoControl()接收由CreateFile()函數(shù)獲得的句柄及控制命令碼,設(shè)置輸入/輸出緩沖區(qū)以及緩沖區(qū)的大小。函數(shù)執(zhí)行完成后返回實(shí)際輸出的緩沖區(qū)大小等。CAN總線發(fā)送與接收函數(shù)WriteFile()和ReadFile(),利用驅(qū)動文件句柄、發(fā)送和接收緩沖區(qū)等參數(shù)完成數(shù)據(jù)的發(fā)送和接收,操作成功后返回實(shí)際發(fā)送和接收的字節(jié)數(shù)。
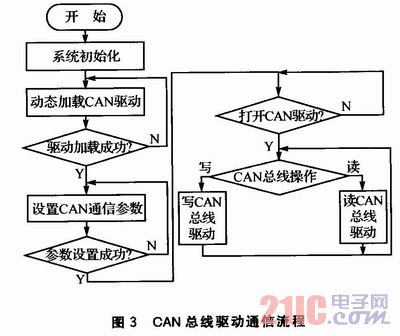
為了不讓主線程一直處于等待數(shù)據(jù)到來的狀態(tài),讓主線程擁有時(shí)間令牌來操作其他事情,程序采用多線程設(shè)計(jì),創(chuàng)建一個(gè)接收數(shù)據(jù)線程。接收數(shù)據(jù)線程是一個(gè)無限循環(huán),它不斷查詢CAN總線數(shù)據(jù)退出標(biāo)志,如果退出標(biāo)志有效,則該循環(huán)結(jié)束退出。驅(qū)動程序流程如圖3所示。
結(jié)語
目前,基于嵌入式技術(shù)的車載儀表逐漸開始流行。本文使用基于WinCE的ARM9微處理器作為開發(fā)平臺,處理速度快,功能強(qiáng)大;使用CAN總線技術(shù)進(jìn)行信號的相互傳輸,CAN總線實(shí)時(shí)接收汽車部件發(fā)送來的信息,并進(jìn)行處理與分析;使用WinCE操作系統(tǒng),界面友好。本智能車載儀表系統(tǒng)可以節(jié)約成本、降低功耗,并且可維護(hù)性強(qiáng),便于擴(kuò)展和升級。