
1 引言
CAN總線是現(xiàn)場總線的一種,最初用于汽車內(nèi)部檢測部件與執(zhí)行部件之間的數(shù)據(jù)通訊,有極強(qiáng)的抗惡劣環(huán)境和抗干擾能力。由于本身的特點(diǎn),其應(yīng)用范圍已經(jīng)由交通運(yùn)輸擴(kuò)展到過程控制、數(shù)控機(jī)床、機(jī)器人、智能建筑、醫(yī)療器械等領(lǐng)域,被公認(rèn)是幾種最有前途的現(xiàn)場總線之一。
與多數(shù)現(xiàn)場總線(如Profibus、CC-Link等)的物理層采用RS485主從協(xié)議不一樣,CAN的介質(zhì)訪問采用載波偵聽多路訪問(CSMA)技術(shù),從而允許多主工作方式。并且,由于采用非破壞性總線仲裁技術(shù),大大節(jié)省了總線沖突仲裁時(shí)間。與多數(shù)現(xiàn)場總線不一樣,CAN總線只有物理層和數(shù)據(jù)鏈路層,應(yīng)用層留給用戶開發(fā),使用戶擁有了相當(dāng)?shù)撵`活性。這些優(yōu)點(diǎn)令人注目,以致于一些頗有名氣的現(xiàn)場總線(如DeviceNet、CANopen等)的底層就使用CAN。很多處理器制造商將CAN總線協(xié)議集成到他們的CPU芯片上,如51系列單片機(jī)、196系列單片機(jī)、運(yùn)動(dòng)控制專用數(shù)字信號(hào)處理器DSP等;很多變頻器制造商將CAN通訊卡作為選件提供給用戶或者干脆集成在變頻器中,如Lenze93系列變頻器、Siments6SE系列變頻器、三菱FR-A500系列變頻器等;很多可編程控制器制造商給用戶提供CAN通訊卡選件或者提供CAN總線接口,如貝加來(BR)2000系列可編程控制器、西門子S5系列可編程控制器等。CAN總線簡單易學(xué)、容易開發(fā)、有眾多的廠商支持,適合中國的國情。
印染前處理設(shè)備,如退煮漂聯(lián)合機(jī)、布夾絲光機(jī)、直輥絲光機(jī)、皂洗機(jī)等,機(jī)臺(tái)長,采用多電機(jī)分部傳動(dòng),要求恒張力同步調(diào)速。目前,流行的技術(shù)是用PLC控制多臺(tái)變頻器,用松緊架或者張力傳感器實(shí)現(xiàn)多機(jī)臺(tái)同步。印染后處理設(shè)備(如熱風(fēng)拉幅機(jī)、熱定型機(jī)等)、造紙生產(chǎn)線、濕法氈生產(chǎn)線也采用了類似的技術(shù)。這里變頻器使用的很多,變頻器與可編程控制器之間的連接線也很多,頻率給定、各種監(jiān)控信息(如電壓、電流、速度、轉(zhuǎn)矩等)采用模擬量,模擬量容易受干擾。如果引入現(xiàn)場總線技術(shù),眾多變頻器與可編程控制器之間的連接線大為減少(實(shí)際上減為兩根),模擬頻率給定變?yōu)閿?shù)字頻率給定,各種監(jiān)控信息、操作信息可以在現(xiàn)場總線上傳遞,以上的缺憾得以解決。
2 基于CAN總線的PCC退煮漂聯(lián)合機(jī)控制方案
控制部分的核心是一臺(tái)貝加來可編程計(jì)算機(jī)控制器(Programmable Computer Controller 簡稱PCC)BR2005,它通過422總線與觸摸屏監(jiān)控站(Provit2200)相連,在此操作者輸入指令并監(jiān)控整機(jī)的運(yùn)行狀態(tài)。PCC通過CAN總線與29臺(tái)西門子變頻器相連,用CAN總線傳送頻率給定命令、起停變頻器、監(jiān)視變頻器的運(yùn)行狀態(tài)。29臺(tái)變頻電機(jī)間的同步由松緊架完成,圖中沒有畫出。PCC還完成整臺(tái)設(shè)備的邏輯控制以及溫度、壓力、流量、液位、PH值和配方的閉環(huán)控制。詳見圖1。由于使用了現(xiàn)場總線技術(shù),使得變頻器的現(xiàn)場連接線大為減少,實(shí)際為兩根線用菊花鏈方式將PCC與29臺(tái)變頻器串接起來。貝加來可編程計(jì)算機(jī)控制器,是集計(jì)算機(jī)技術(shù)、通訊技術(shù)、自動(dòng)控制技術(shù)為一體的新型工業(yè)控制裝置。可編程控制技術(shù)從60年代誕生以來,經(jīng)歷了可編程邏輯控制器(Programmble Logic Controller),簡稱PLC,可編程控制器(Programmble Controller),簡稱PC,到今日的PCC,已是第三代產(chǎn)品。新一代的PCC已經(jīng)能勝任大型的集散控制和復(fù)雜的過程控制。其良好的兼容性、豐富的功能函數(shù)、品種多樣的硬件模塊、高級(jí)編程語言的使用、模塊化的編程方式,使PCC已能滿足各種工業(yè)控制的需要。該P(yáng)CC的編程平臺(tái)采用BR提供的Automation Studio軟件,Windows界面,使用方便。它具有RS232、RS485、RS422、和CAN、Profibus現(xiàn)場總線接口,可以方便的構(gòu)成控制系統(tǒng)計(jì)算機(jī)網(wǎng)絡(luò)。監(jiān)控站(Provit2200)是一臺(tái)486工控機(jī),配有CAN、RS485、RS422、RS232接口和5.7英寸彩色液晶觸摸屏和16鍵,通過RS422與PCC交換信息。該P(yáng)CC除了配有CPU和CAN通訊模塊外,還裝配了5塊數(shù)字量輸入(5*16點(diǎn))模塊、3塊數(shù)字量輸出(3*16點(diǎn))模塊、2塊模擬量輸入(2*8點(diǎn))模塊和2塊模擬量輸出模塊。邏輯控制部分采用梯形圖編程,CAN通訊部分和閉環(huán)控制部分采用Basic語言編程,也可以選用C語言編程。全部程序由三人分頭完成,放在同一個(gè)項(xiàng)目下面。相互的關(guān)聯(lián)借助全局變量完成。
3 基于CAN總線的PLC濕法氈生產(chǎn)線卷繞部分控制方案
控制部分的核心是一臺(tái)西門子S5-95U可編程控制器PLC和三臺(tái)Lenze93系列交流伺服控制器9326。PLC通過CAN總線與三臺(tái)交流伺服控制器9326交換信息,實(shí)現(xiàn)變張力卷繞控制,如圖2所示。S5-95U除了配有CAN通訊模塊外還有64點(diǎn)數(shù)字量輸入輸出。
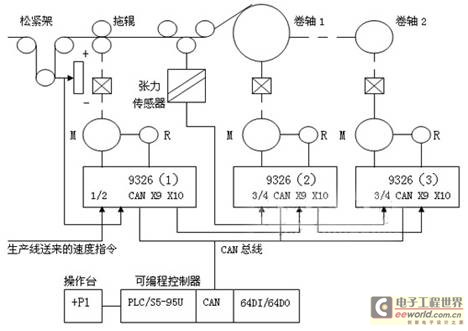
圖2 濕法氈生產(chǎn)線卷繞部分工作原理圖
這里總共使用了三臺(tái)LENZE-9300系列伺服控制器(9326),驅(qū)動(dòng)三臺(tái)帶有旋轉(zhuǎn)變壓器(R)的變頻專用異步電動(dòng)機(jī)(M)。其中,拖輥伺服控制器9326(1)工作在速度模式,它的速度給定(1/2端)來自生產(chǎn)線主控PLC的模擬量輸出,輔助速度給定(3/4端)來自于松緊架信號(hào),以此和生產(chǎn)線保持同步;卷軸1和卷軸2伺服控制器(2/3)工作在轉(zhuǎn)矩模式,具有內(nèi)部卷徑計(jì)算功能,能對通過CAN總線由PLC發(fā)送來的張力給定信息和由張力傳感器發(fā)送來的實(shí)際張力信息進(jìn)行閉環(huán)控制。無須對卷軸1和卷軸2實(shí)行專門的速度控制,它們能夠自動(dòng)的將其線速度浮動(dòng)到需要的數(shù)值。卷徑計(jì)算所需要的線速度信息由拖輥伺服控制器通過專門的速度級(jí)聯(lián)接口X9-X10送來,卷徑計(jì)算所需要的轉(zhuǎn)速信息由旋轉(zhuǎn)變壓器測定。卷軸1和卷軸2交替工作,實(shí)現(xiàn)連續(xù)的卷繞,由LENZE-8215變頻器驅(qū)動(dòng)的換軸電機(jī)完成換軸功能(圖中沒有畫出)。CAN總線還將伺服控制器(2/3)計(jì)算出的卷徑信息發(fā)送到PLC,由PLC據(jù)此完成張力給定的計(jì)算,然后通過 CAN總線送回伺服控制器(2/3)。卷繞部分對卷軸的要求是內(nèi)緊外松,這就要求初始張力大,隨著卷徑的變大,張力按照某種規(guī)律逐漸變小。該應(yīng)用系統(tǒng)能完全滿足這些要求,實(shí)際運(yùn)行證明上述卷繞系統(tǒng)運(yùn)行可靠,卷徑由86毫米到1200毫米卷繞密實(shí)整齊,卷繞速度可達(dá)80米/分。
4 基于CAN總線的工控機(jī)平網(wǎng)印花機(jī)刮印部分控制方案
圖3示出了一個(gè)對BUSH-5V平網(wǎng)印花機(jī)刮印部分控制的改造方案。原方案在中央控制器和刮印單元之間使用RS-232串行通訊,速度慢,可靠性差。因而一些關(guān)鍵性的操作仍然沿用傳統(tǒng)的方法,直接連線。BUSH-7V改用RS-485串行通訊,可靠性有了提高。在我們的方案中,使用CAN總線實(shí)現(xiàn)中央控制IPC與各刮印單元變頻器之間的串行通訊,廣播起停命令、監(jiān)控各刮印單元的工作狀況;各刮印單元之間也可以相互通訊,復(fù)制設(shè)定信息,簡化刮印單元參數(shù)的重復(fù)設(shè)定。鑒于CAN的可靠性很高,所有的控制和狀態(tài)信號(hào)都通過總線發(fā)送,簡化了布線,提高了實(shí)時(shí)性。
這里,刮印單元共有18套,使用我們自己開發(fā)的基于DSP的專用變頻控制器。運(yùn)動(dòng)控制專用TMS320LF2407 DSP芯片中集成有CAN控制器,不用增加任何硬件,專用變頻器便有了CAN通訊功能。中央控制單元IPC中配有CAN通訊卡。
有關(guān)CAN總線的討論文章已經(jīng)很多,用的比較多的獨(dú)立CAN芯片是SJA1000,帶有CAN控制器的8位單片機(jī)有P8xC591等,但是TMS320LF2407中集成的CAN控制器很有特點(diǎn)。它有六個(gè)郵箱,其中有兩個(gè)發(fā)送郵箱、兩個(gè)接收郵箱、兩個(gè)發(fā)送/接收可選郵箱;每個(gè)發(fā)送郵箱有獨(dú)立的發(fā)送標(biāo)識(shí)碼,每個(gè)接收郵箱有獨(dú)立的接收驗(yàn)收碼,每兩個(gè)接收郵箱公用一個(gè)接收屏蔽碼。這種多郵箱安排比SJA1000的相當(dāng)于只有兩個(gè)郵箱(一個(gè)接收郵箱/一個(gè)發(fā)送郵箱)來說,極大的方便了用戶構(gòu)造更復(fù)雜的網(wǎng)絡(luò),實(shí)現(xiàn)更為靈活的通訊。也簡化了通訊協(xié)議的編寫。
ISO 11898 CAN通訊協(xié)議只有兩層:物理層和數(shù)據(jù)鏈路層,必不可少的應(yīng)用層協(xié)議留給二次開發(fā)者選擇或者設(shè)計(jì)。可以選用的較為通用的應(yīng)用層協(xié)議主要有:CANopen、DeviceNet和SDS,其中CANopen在歐洲較為流行,而DeviceNet、SDS則在美國比較普遍。考慮到我們所開發(fā)的平網(wǎng)印花機(jī)刮印單元變頻器是專用的,因而沒有采用通用的應(yīng)用層協(xié)議,而是量身定做了我們專用的應(yīng)用層協(xié)議。物理層協(xié)議負(fù)責(zé)物理信號(hào)的傳輸、譯碼、位時(shí)序、位同步等功能;數(shù)據(jù)鏈路層協(xié)議負(fù)責(zé)總線仲裁、信息分幀、數(shù)據(jù)確認(rèn)、錯(cuò)誤檢測、流量控制等功能;應(yīng)用層協(xié)議主要負(fù)責(zé)標(biāo)識(shí)符的分配,其次是網(wǎng)絡(luò)啟動(dòng)或者監(jiān)控節(jié)點(diǎn)的處理等。由于CAN協(xié)議沒有規(guī)定信息標(biāo)識(shí)符的分配,因而可以根據(jù)不同的應(yīng)用使用不同的方法。所以,在設(shè)計(jì)一個(gè)基于CAN的通訊系統(tǒng)時(shí),確定CAN標(biāo)識(shí)符的分配非常重要,是應(yīng)用層協(xié)議的主要內(nèi)容。
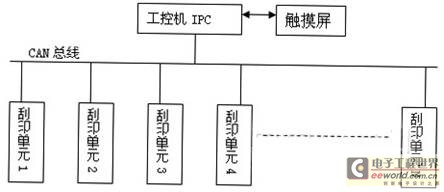
圖3 平網(wǎng)印花機(jī)CAN總線控制網(wǎng)絡(luò)
5 結(jié)論
從以上的分析論述中,可以得出以下簡單的結(jié)論:CAN總線以其特點(diǎn),與PLC和IPC相結(jié)合,已經(jīng)在印染類設(shè)備(包括造紙類設(shè)備)的控制中占有了重要的位置。考慮到CAN的開發(fā)比較容易,應(yīng)用層協(xié)議留下了二次開發(fā)的余地,對于沒有自己的現(xiàn)場總線標(biāo)準(zhǔn)的中國來說,CAN給了我們機(jī)會(huì)。