
電視圖像跟蹤器是一種具有簡單智能的圖像跟蹤裝置,由于需要逐場(20ms)處理視場中的數(shù)據(jù),因此處理的數(shù)據(jù)量大、算法復(fù)雜度高,傳統(tǒng)的處理器一般不能滿足速度要求,本系統(tǒng)選擇美國TI公司TMS320C5416信號處理器為核心,實(shí)現(xiàn)了實(shí)時(shí)采集視場中的圖像數(shù)據(jù)并完成相應(yīng)的圖像處理算法運(yùn)算的任務(wù)。TMS320C5416主頻可達(dá)160MHz,片內(nèi)總存儲空間為128M×16bit,是一款高性能低功耗通用數(shù)字信號處理芯片。該系統(tǒng)能處理50場/秒的,圖像分辨率可調(diào)的標(biāo)準(zhǔn)電視圖像信號。
2.系統(tǒng)硬件框圖
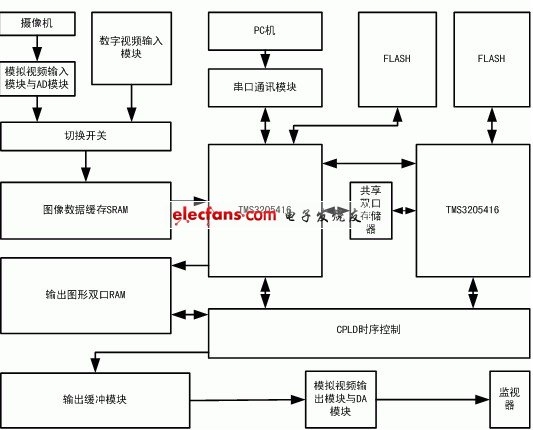
圖1系統(tǒng)硬件整體結(jié)構(gòu)框圖
如圖1所示系統(tǒng)采用雙DSP+CPLD構(gòu)架,系統(tǒng)有兩路輸入,一路接數(shù)字視頻信號輸入,另外一路從攝像機(jī)輸入PAL制式的視頻信號。雙DSP中一個為主DSP,負(fù)責(zé)處理跟蹤算法以及與上位機(jī)通信,另外一個從DSP負(fù)責(zé)實(shí)時(shí)產(chǎn)生模擬高斯噪聲用以檢測各種噪聲條件下跟蹤算法的效果。兩個DSP之間通過一個共享雙口RAM或HPI進(jìn)行通信。在場正程圖像數(shù)據(jù)存儲到圖像SRAM中,主DSP在場逆程從圖像雙口RAM中讀取圖像數(shù)據(jù)到DSP內(nèi)部,場正程開始時(shí)主DSP開始進(jìn)行圖像處理算法,在下一場逆程主DSP將處理的結(jié)果以及相關(guān)數(shù)據(jù)寫入圖形顯示雙口RAM同時(shí)開始從SRAM讀入下一場數(shù)據(jù),DSP處理完成以后在時(shí)序電路和視頻復(fù)合電路配合下將處理結(jié)果顯示到監(jiān)視器上,完成實(shí)時(shí)圖像處理任務(wù)。
2.1圖像采集模塊
圖像采集模塊的主要功能是獲取輸入視頻信號中的灰度數(shù)據(jù)和同步時(shí)鐘,它是后續(xù)處理的基準(zhǔn)。系統(tǒng)采用同步分離和鎖相技術(shù)設(shè)計(jì),采用分立元件。具體實(shí)現(xiàn)是信號從CCD出來后分為兩路,一路經(jīng)同步分離同步分離器LM1881,輸出復(fù)合同步HS,場同步VS作為后面電路的控制信號,另一路經(jīng)篏位和直流恢復(fù),然后放大,將圖像信號調(diào)整到A/D轉(zhuǎn)換器的參考電壓范圍之內(nèi)。對行同步信號進(jìn)行鎖相倍頻即可得到像素時(shí)鐘信號,鎖相環(huán)芯片采用74HC4046。輸入視頻信號經(jīng)鎖相環(huán)鎖相輸出系統(tǒng)象素時(shí)鐘提供給A/D變換器使用,得到數(shù)字圖像數(shù)據(jù)。
2.2時(shí)序電路模塊
時(shí)序模塊主要由一片CPLD(Xilinx公司的95288XL)實(shí)現(xiàn),包括鎖相計(jì)數(shù)、標(biāo)準(zhǔn)視頻行場信號生成、DSP的外接存儲器接口片選讀寫信號生成以及部分存儲器地址生成、實(shí)現(xiàn)圖形信號的并串轉(zhuǎn)換、用戶自定義I/O等。
2.3通訊接口模塊
本系統(tǒng)用到一個異步串口接收PC發(fā)送的調(diào)試命令,并向PC返回運(yùn)算結(jié)果。
5416提供的串口是一種同步串行接口,并不支持通用異步接收器/發(fā)送器(UART)標(biāo)準(zhǔn),本系統(tǒng)使用MAXIM公司的MAX3100芯片實(shí)現(xiàn)同步串口到異步串口的轉(zhuǎn)換。5416使用FSR和FSX作為每次傳輸?shù)耐叫盘枺現(xiàn)SX作為MAX3100的選通信號。同步接收時(shí)鐘CLKR和同步發(fā)送時(shí)鐘CLKX在本系統(tǒng)中使用內(nèi)部的時(shí)鐘源,并且把CLKX作為MAX3100的同步時(shí)鐘。系統(tǒng)中使用MAX3100的接收中斷作為DSP的外部中斷信號,通知DSP數(shù)據(jù)準(zhǔn)備好,可以開始接收。
2.4存儲器訪問模塊
圖像緩存采用單口大容量SRAM,可以存儲整場圖像。在場正程接收從采集模塊采集進(jìn)來的數(shù)據(jù)。在場逆程DSP將待處理的數(shù)據(jù)由SRAM讀入片內(nèi)數(shù)據(jù)區(qū)處理。
圖形數(shù)據(jù)雙口RAM用于存儲用于顯示的字符、圖形等。視場中的一個確定位置對應(yīng)于存儲器中的一個單元(byte)中的一位(bit)。DSP將要顯示的字符或圖形以點(diǎn)陣形式寫入存儲器規(guī)定的存儲單元內(nèi),存儲器在系統(tǒng)時(shí)序控制下讀出要顯示字符或圖形的點(diǎn)陣信號。8位圖形數(shù)據(jù)經(jīng)CPLD并-串轉(zhuǎn)換電路變成串行信號迭加在模擬視頻信號上提供顯示。
3.系統(tǒng)軟件設(shè)計(jì)
本系統(tǒng)可作為數(shù)字圖像處理的通用平臺,處理多種圖像處理程序,軟件設(shè)計(jì)靈活。
主DSP用以完成搜索跟蹤算法,搜索、跟蹤的算法有很多種,現(xiàn)以經(jīng)典的相關(guān)跟蹤算法為例來說明圖像跟蹤處理軟件設(shè)計(jì)的一般流程。如果需要,可以增加不同的跟蹤算法。
相關(guān)跟蹤是利用圖像相似性度量方法,在圖像中尋找最佳匹配子區(qū)的工作,可選用算法包括歸一化互相關(guān)(NCC)和平均絕對差累加和(MAD)等。由于相關(guān)運(yùn)算數(shù)據(jù)處理量大,為便于實(shí)時(shí)實(shí)現(xiàn),本系統(tǒng)采用最小絕對差累加和的相關(guān)匹配算法。該方法在計(jì)算兩幅圖象f1、f2它們之間的相似性度量時(shí)按下式進(jìn)行:
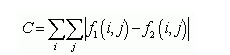
其中f1、f2分別表示模板和搜索區(qū)圖象的子區(qū)圖象,在計(jì)算所有搜索區(qū)圖子區(qū)與模板圖象的絕對差累加和C后,確定最小C對應(yīng)的子區(qū)位置即最佳匹配點(diǎn)。
對于32×32的模板和64×64的搜索區(qū)圖象,每一幀圖象僅僅確定最佳匹配位置的計(jì)算次數(shù)為,再加上模板修正和決策判斷等工作,每一幀的數(shù)據(jù)計(jì)算量很大。例如,當(dāng)指令周期為6ns時(shí),運(yùn)算時(shí)間約為7ms。為了減少計(jì)算量,可采用圖象分辨率先粗后精的方法。圖象分辨率降低一倍,計(jì)算量降低接近15倍。實(shí)際系統(tǒng)中,模板粗采樣匹配跟蹤執(zhí)行時(shí)間約為1ms,可以滿足系統(tǒng)實(shí)時(shí)性的要求。
實(shí)踐證明,在進(jìn)行序列圖象跟蹤過程中,如果單純地將當(dāng)前圖象的最佳匹配位置處的圖象來作為模板進(jìn)行下一幀圖象的匹配,跟蹤結(jié)果很容易受某一幀發(fā)生突變圖象的影響而偏離正確位置。因此,應(yīng)當(dāng)考慮根據(jù)舊模板和當(dāng)前圖象的最佳匹配位置處的匹配度(合適度)來制定合適的新模板,相當(dāng)于對匹配跟蹤過程進(jìn)行一個指導(dǎo),以達(dá)到比較好的跟蹤效果.本系統(tǒng)設(shè)計(jì)一種模板加權(quán)修正方案,即![]() 其中:A為原模板圖像內(nèi)容;B為本次匹配最佳匹配位置子圖像內(nèi)容;M為修正后模板圖像內(nèi)容;W為加權(quán)系數(shù)(根據(jù)幀內(nèi)和幀間相關(guān)置信度選取)在跟蹤過程中,由于背景復(fù)雜,還可能會出現(xiàn)局部遮擋等情況,本系統(tǒng)采取了抗遮擋措施在一定程度上消除了局部遮擋的影響。其根據(jù)是在發(fā)生遮擋的情況下,最佳匹配位置的絕對差累加和會比未發(fā)生遮擋的時(shí)候大得多,在匹配過程中對匹配結(jié)果進(jìn)行遮擋評估如下:
其中:A為原模板圖像內(nèi)容;B為本次匹配最佳匹配位置子圖像內(nèi)容;M為修正后模板圖像內(nèi)容;W為加權(quán)系數(shù)(根據(jù)幀內(nèi)和幀間相關(guān)置信度選取)在跟蹤過程中,由于背景復(fù)雜,還可能會出現(xiàn)局部遮擋等情況,本系統(tǒng)采取了抗遮擋措施在一定程度上消除了局部遮擋的影響。其根據(jù)是在發(fā)生遮擋的情況下,最佳匹配位置的絕對差累加和會比未發(fā)生遮擋的時(shí)候大得多,在匹配過程中對匹配結(jié)果進(jìn)行遮擋評估如下:
1、首先確定遮擋面積門限即遮擋部分占模板面積的百分比門限,超過門限就認(rèn)為被遮擋;
2、然后根據(jù)最佳匹配位置的平均象素絕對差為參考確定遮擋象素的灰度門限,實(shí)時(shí)搜索區(qū)對應(yīng)模板區(qū)域的象素灰度值大于灰度門限,則認(rèn)為該象素被遮擋;
3、計(jì)算當(dāng)前最佳匹配位置圖象與模板圖象絕對差超出遮擋象素灰度門限的個數(shù)S,然后判斷S是否超過遮擋的面積門限,如果超過,則認(rèn)為目標(biāo)被遮擋,置目標(biāo)遮擋標(biāo)志位,調(diào)初始化匹配結(jié)果堆棧例程,模板校正周期計(jì)數(shù)器歸位停止校正模板,然后把當(dāng)前的匹配結(jié)果用前面若干場匹配結(jié)果的統(tǒng)計(jì)平均值替換;否則認(rèn)為沒有被遮擋,清目標(biāo)遮擋標(biāo)志位。
系統(tǒng)軟件具體實(shí)現(xiàn)過程為:首先對系統(tǒng)進(jìn)行初始化。初始化子程序中定義一個狀態(tài)字SysStatus來控制程序的流程,例如SysStatus=0時(shí)是搜索態(tài),SysStatus=1時(shí)是相關(guān)跟蹤算法SysStatus=2時(shí)是對比度跟蹤態(tài)等。初始化結(jié)束后,系統(tǒng)進(jìn)入循環(huán)等待狀態(tài),每場查詢SysStatus的狀態(tài),等待狀態(tài)的改變。跟蹤目標(biāo)模板的初始捕獲可以選擇在搜索態(tài)由目標(biāo)搜索算法完成,也可由人工完成。以人工捕獲為例,用戶在上位PC機(jī)視場中選定目標(biāo)區(qū)域,然后將目標(biāo)位置坐標(biāo)及搜索區(qū)域大小信息通過RS232串口傳送給DSP,DSP根據(jù)接收到的狀態(tài)賦值給全局變量SysStatus。然后根據(jù)SysStatus參數(shù)所指示的值進(jìn)入不同的跟蹤狀態(tài)。
具體相關(guān)跟蹤算法流程如下圖2所示:
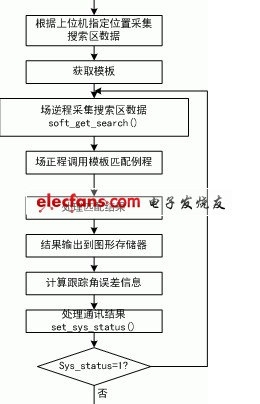
圖2相關(guān)匹配流程圖
一場數(shù)據(jù)處理完成后結(jié)果一路經(jīng)串口反饋到上位機(jī)上,一路經(jīng)圖形存儲器把在目標(biāo)位置處畫出窗口并顯示到監(jiān)視器上。然后開始進(jìn)行下一場處理。
從DSP完成實(shí)時(shí)高斯噪聲的生產(chǎn),噪聲疊加到采集的輸入圖像上可以用以用來檢驗(yàn)不同的跟蹤算法在不同強(qiáng)度的高斯噪聲下的實(shí)際效果。
算法為由均勻噪聲通過映射表生成高斯隨機(jī)噪聲,具有高速、高精度的優(yōu)點(diǎn)。原理框圖如圖3所示:左半部分為均勻噪聲生成部分,采用模數(shù)取余法,依靠已有的k個在(-x,x)內(nèi)均勻分布,互相獨(dú)立的隨機(jī)數(shù)種子x(1),…..x(k),不斷的生成新的隨機(jī)數(shù),并將之向外輸出。右半部分采用左部分的輸出值為偏移地址,加上右表的基地址生成映射表地址,將查表后得到的該地址結(jié)果輸出就得到了所要求的結(jié)果高斯噪聲值,然后進(jìn)入下一個循環(huán)。
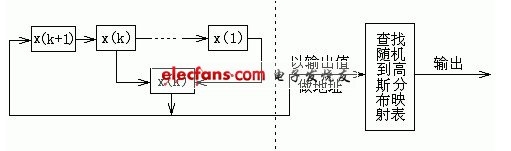
圖3噪聲產(chǎn)生原理圖
從DSP主要完成噪聲的產(chǎn)生工作,如果系統(tǒng)不需要模擬高斯噪聲,此DSP也可根據(jù)實(shí)際需要用作別的用途,增加了系統(tǒng)的可擴(kuò)展性。
4.結(jié)束語
本系統(tǒng)在硬件上采用了DSP、CPLD等集成度高、功耗低的先進(jìn)器件,使得系統(tǒng)電路具備體積小、重量輕、功耗低、可靠性高等優(yōu)點(diǎn),是一種優(yōu)良的圖像處理平臺。