
利用80C552構(gòu)成的噪聲測(cè)量自動(dòng)定位裝置的
摘要: 本文介紹一種噪聲自動(dòng)定位系統(tǒng)可以減小工作量并且精度高,他是由80C552[1]單片機(jī)為核心與DME2000[2]光電距離檢測(cè)器構(gòu)成的自動(dòng)定位裝置來(lái)進(jìn)行噪聲測(cè)量,通過LCD顯示工作狀態(tài)具有很高的性能價(jià)格比,極具推廣價(jià)值。
Abstract:
Key words :
1 引 言
噪聲對(duì)人體健康有著嚴(yán)重的危害,因此如何減少噪聲危害已成為當(dāng)前一項(xiàng)迫切的任務(wù)。精確的測(cè)量、分析噪聲將為控制噪聲源、改進(jìn)產(chǎn)品設(shè)計(jì)工藝、制定環(huán)保措施和相關(guān)法律提供重要依據(jù)。在辦公自動(dòng)化、計(jì)算機(jī)等新技術(shù)日新月異發(fā)展的今天,人們同樣把對(duì)辦公自動(dòng)化設(shè)備的噪聲處理倍加關(guān)注,在相應(yīng)的環(huán)保標(biāo)準(zhǔn)中噪聲作為一項(xiàng)重要指標(biāo)。在噪聲測(cè)量方面大都采用分布采點(diǎn)的方法來(lái)進(jìn)行測(cè)量。但是測(cè)量點(diǎn)選擇只是通過簡(jiǎn)單的投影量距的方法,每次測(cè)量都需人工去測(cè)量調(diào)整聲級(jí)計(jì)測(cè)量頭與被測(cè)物之間距離,因此工作量大而且耗時(shí)耗工。
本文介紹一種噪聲自動(dòng)定位系統(tǒng)可以減小工作量并且精度高,他是由80C552[1]單片機(jī)為核心與DME2000[2]光電距離檢測(cè)器構(gòu)成的自動(dòng)定位裝置來(lái)進(jìn)行噪聲測(cè)量,通過LCD顯示工作狀態(tài)具有很高的性能價(jià)格比,極具推廣價(jià)值。
2 基本原理
(1) 噪聲物理度量參數(shù)
噪聲與聲音是相同的,只不過噪聲是頻率更為復(fù)雜的聲音而已,通過常用的聲壓級(jí)、聲強(qiáng)級(jí)和聲功率級(jí)來(lái)表示噪聲的強(qiáng)弱,用頻譜或頻率來(lái)表示噪聲的高低。在實(shí)際測(cè)量中一般用聲功率表示噪聲特征:
Lp= 10lgP/P0
其中:Lp為聲功率級(jí)(dB);
p為聲功率;
p。為參考基準(zhǔn)聲功率(10-12W)。
但在實(shí)際測(cè)量中聲功率不是直接測(cè)得的,只能在特定的測(cè)試條件下由測(cè)得的聲壓級(jí)經(jīng)計(jì)算得到,在辦公自動(dòng)化產(chǎn)品測(cè)量中一般采用自由場(chǎng)條件工程法。其中在反射面上自由聲場(chǎng)條件下,聲壓級(jí)與聲功率級(jí)的關(guān)系為:
Lp=Lp+10lgS/S0-K2
其中:Lp為測(cè)試表面的平均聲壓級(jí)(dB);
S為測(cè)試表面積(m2);
s。為基準(zhǔn)表面積(1 m2);
K2為環(huán)境引起的修正值。
(2)測(cè)試方法
在噪聲的測(cè)試中,以靜電復(fù)印機(jī)噪聲測(cè)試為例,測(cè)量點(diǎn)選擇用一個(gè)剛好能包羅聲源的最小矩形六面體表面(或球面體、半球面體)作為基準(zhǔn)測(cè)量表面,具體測(cè)量原則:只要測(cè)量點(diǎn)中最大、最小聲壓級(jí)之差不超過測(cè)量點(diǎn)數(shù)。
(3)自動(dòng)定位裝置
自動(dòng)定位系統(tǒng)的基本原理如圖1所示,利用距離傳感器測(cè)量被測(cè)物(復(fù)印機(jī))的距離,由單片機(jī)控制步進(jìn)電機(jī)調(diào)整聲級(jí)計(jì)與被測(cè)物的距離。其中距離傳感器采用DME2000光電距離檢測(cè)器,DME2000發(fā)射紅色一2級(jí)光(對(duì)人眼安全),距離值可通過模擬量或RS232進(jìn)行傳輸,利用其直接反射模式可以以非接觸方式測(cè)量并且不受物體反射情形的影響,幾乎任何物體表面如堅(jiān)硬、液面、粉狀等物體均可測(cè)量,檢測(cè)分析度為0.125mm,精度為±5mm。測(cè)量誤差隨被測(cè)物反射的減少而增加,但這一情況可由可選積分系數(shù)的積分器加以補(bǔ)償。
|
|

利用步進(jìn)電機(jī)可以進(jìn)行可逆距離的調(diào)整,由步進(jìn)電機(jī)原理可知,步進(jìn)電機(jī)各相繞組通電順序不同,轉(zhuǎn)動(dòng)方向就不同。步進(jìn)電機(jī)控制程序的主要任務(wù)是:判斷旋轉(zhuǎn)方向,按順序送出控制脈沖,以及判斷所要送出脈沖信號(hào)是否已經(jīng)送完。設(shè)步進(jìn)電機(jī)所要走的總步長(zhǎng)放在寄存器R4中,轉(zhuǎn)向標(biāo)志存放在程序狀態(tài)寄存器中標(biāo)志位F0(即PSW.5H)中,當(dāng)F0為0時(shí),表示步進(jìn)電機(jī)正轉(zhuǎn);當(dāng)F0為1時(shí),表示步進(jìn)電機(jī)反轉(zhuǎn)。在2DH單元內(nèi)存放結(jié)束標(biāo)志00H字。各點(diǎn)的距離情況可由鍵盤選擇由LCD顯示。步進(jìn)電機(jī)控制程序清單如下:
CONTROLl: PUSH A
MOV R4,#N
CLR C
ORL C,PSW.5
JC ROTE
MOV R0,#20H
AJMP LOOP
ROTE: MOV R0,#H27
LOOP: MOV A,@R0
MOV P1,A
ACALL DELAY
INC R0
MOV A,#00H
ORL A,@R0
JZ TPL
LOOP1: DJNZ R4,LOOP
POP A
RET
TPL: MOV A,R0
CLR C
SUBB A,#61
MOV R0,A
AJMP LOOP1
DELAY: MOV R2,#M
DELAY1: MOV A,#M1
LOOP2: DEC A
JNZ LOOP2
DJNZ R2,DELAY1
RET
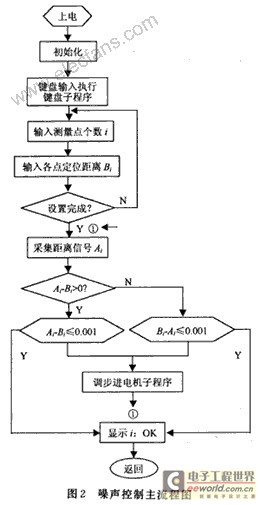
單片機(jī)控制的自動(dòng)定位裝置工作流程圖如圖2所步進(jìn)電機(jī)控制流程圖如圖3所示。
|
|
|
|
3 結(jié) 語(yǔ)
本文介紹了利用80C552單片機(jī)與DME2000構(gòu)成的噪聲測(cè)量自動(dòng)定位裝置,他可省去每次人工量距的麻煩并且精度高,利用LCD顯示自動(dòng)定位情況更加方便,他不但可以作為辦公自動(dòng)化噪聲測(cè)量裝置也可應(yīng)用于大型機(jī)械監(jiān)測(cè)。
此內(nèi)容為AET網(wǎng)站原創(chuàng),未經(jīng)授權(quán)禁止轉(zhuǎn)載。