
摘 要: 介紹兩輥式汽車變截面板簧軋機(jī)計(jì)算機(jī)控制系統(tǒng)的主要硬件結(jié)構(gòu)、設(shè)計(jì)方法,以及多模態(tài)智能控制算法在液壓伺服系統(tǒng)中的應(yīng)用。該控制系統(tǒng)設(shè)計(jì)合理,運(yùn)行穩(wěn)定,控制精度高。
關(guān)鍵詞: 變截面軋機(jī) 鋼板彈簧 多模態(tài)智能控制
變截面軋機(jī)是生產(chǎn)汽車變截面板簧的關(guān)鍵設(shè)備。它將加熱到950℃的等截面彈簧鋼板通過轉(zhuǎn)動(dòng)的軋輥壓縮及拉拔機(jī)構(gòu)拉拔,使其橫斷面按照設(shè)計(jì)的變形曲線改變。目前國(guó)內(nèi)鋼板彈簧生產(chǎn)企業(yè)或者采用進(jìn)口軋機(jī)如英國(guó)西爾公司、德國(guó)波克公司的某些產(chǎn)品,或者采用國(guó)產(chǎn)的仿西爾公司的三輥軋機(jī)及一些簡(jiǎn)易軋機(jī)。簡(jiǎn)易軋機(jī)生產(chǎn)的產(chǎn)品精度低、展寬大,國(guó)產(chǎn)三輥軋機(jī)能耗、設(shè)備的體積較大。
兩輥式變截面軋機(jī)是目前國(guó)內(nèi)開發(fā)出的技術(shù)含量較高的軋機(jī)產(chǎn)品。該軋機(jī)機(jī)械液壓結(jié)構(gòu)設(shè)計(jì)緊湊,能耗低,機(jī)械結(jié)構(gòu)中無側(cè)輥限制板簧在軋制過程中的寬展,通過計(jì)算機(jī)控制軋制中的壓下量和拉力及軋輥磨擦力的平衡及壓下拉拔裝置的位置伺服控制,保證軋制后板簧的展寬在1%以內(nèi)。
本文介紹兩輥式軋機(jī)的計(jì)算機(jī)控制系統(tǒng)設(shè)計(jì)。該軋機(jī)由液壓伺服系統(tǒng)驅(qū)動(dòng),采用IBM-PC工業(yè)控制計(jì)算機(jī)及可編程控制器控制。
1 軋機(jī)結(jié)構(gòu)及主要技術(shù)指標(biāo)
1.1軋機(jī)結(jié)構(gòu)
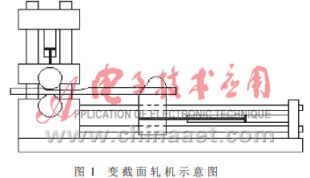
圖1為兩輥式變截面軋機(jī)示意圖。軋機(jī)的機(jī)械結(jié)構(gòu)由一個(gè)鋼制構(gòu)架支撐和軋輥驅(qū)動(dòng)機(jī)構(gòu)及拉拔機(jī)構(gòu)組成,軋輥由液壓馬達(dá)驅(qū)動(dòng),上軋輥由伺服油缸控制上下運(yùn)動(dòng),拉拔機(jī)構(gòu)由導(dǎo)柱和液壓夾緊裝置構(gòu)成,由水平伺服油缸控制做水平方向運(yùn)動(dòng)。由液壓蓄能器穩(wěn)定壓下的壓力,液壓馬達(dá)輸出的扭矩由一比例減壓閥控制。由兩個(gè)旋轉(zhuǎn)編碼器檢測(cè)X、Y方向的位移和速度。
1.2軋機(jī)的主要性能指標(biāo)
· 最大軋制長(zhǎng)度:1200mm
· 最小軋制長(zhǎng)度:300mm
· 板坯最大厚度:50mm
· 板坯最大寬度:160mm
· 最大軋制力:760kN
· 最大拉拔力:200kN
· 最大軋制速度:30m/min
· 產(chǎn)品厚度公差:±0.1mm
· 產(chǎn)品寬度公差:板寬≤100mm ±1mm,板寬>100mm ±1%
2 計(jì)算機(jī)控制系統(tǒng)設(shè)計(jì)
2.1總體設(shè)計(jì)
軋機(jī)控制系統(tǒng)的被控量可分為模擬量部分和開關(guān)量部分。模擬量部分由四路組成,分別控制液壓系統(tǒng)的輸出流量、液壓馬達(dá)的輸出扭矩、拉拔油缸運(yùn)動(dòng)速度、壓下油缸的運(yùn)動(dòng)速度。模擬量部分由一臺(tái)IBM-PC 486DX2-66工控機(jī)控制。開關(guān)量部分由一臺(tái)MASTER K200可編程控制器(PLC)控制,這些控制包括液壓站的油溫控制、軋輥的冷卻、操作按鈕站、拉拔方向的制動(dòng)限位、軋輥及液壓系統(tǒng)的潤(rùn)滑控制、軋機(jī)的狀態(tài)檢測(cè)及故障報(bào)警、各相關(guān)部分間的互鎖控制等。工控機(jī)與PLC間通過開關(guān)量接口進(jìn)行通訊。這樣即減輕IBM-PC的運(yùn)算量,縮短了控制周期;避免控制集中造成的控制風(fēng)險(xiǎn)集中,提高了系統(tǒng)的可靠性。無論IBM-PC或PLC那一部分出現(xiàn)異常,系統(tǒng)均能采取必要的保護(hù)措施。
2.2 控制系統(tǒng)硬件結(jié)構(gòu)
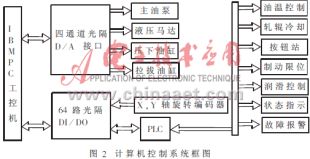
軋機(jī)的計(jì)算機(jī)控制系統(tǒng)結(jié)構(gòu)如圖2所示,由計(jì)算機(jī)、四路12位光隔D/A接口、64路光隔開關(guān)量輸入輸出接口(DI/DO)、可編程控制器(PLC)組成。計(jì)算機(jī)通過DI/DO接口及RS232接口與PLC進(jìn)行通訊。采用兩個(gè)12位絕對(duì)式光電編碼器檢測(cè)X、Y方向的位置和速度。油溫控制部分的作用是控制液壓站的油溫在允許范圍內(nèi);軋輥冷卻部分控制軋輥的冷卻;按扭站用來輸入控制命令;制動(dòng)限位部分在軋機(jī)的拉拔機(jī)構(gòu)超過停車范圍時(shí)自動(dòng)停車;潤(rùn)滑控制部分根據(jù)拉拔機(jī)構(gòu)的運(yùn)行次數(shù)控制潤(rùn)滑油缸自動(dòng)向各潤(rùn)滑點(diǎn)加注潤(rùn)滑油;狀態(tài)指示部分顯示軋機(jī)的運(yùn)行狀態(tài);故障報(bào)警部分在軋機(jī)出現(xiàn)異常時(shí)進(jìn)行聲光報(bào)警。
2.3 多變量處理
在軋制過程中除了對(duì)拉拔、壓下機(jī)構(gòu)進(jìn)行位置伺服控制外,還要保證液壓系統(tǒng)的流量及液壓馬達(dá)的輸出扭矩保持恒定。軋機(jī)的控制系統(tǒng)為一多變量控制系統(tǒng)。
液壓系統(tǒng)采用的伺服閥內(nèi)部具有閥芯位置的閉環(huán)控制環(huán)節(jié),可看作一比例環(huán)節(jié)。為了簡(jiǎn)化控制器結(jié)構(gòu),根據(jù)設(shè)計(jì)要求,拉拔機(jī)構(gòu)、液壓系統(tǒng)的流量、液壓馬達(dá)的輸出扭矩分別采用開環(huán)控制,系統(tǒng)近似為單變量系統(tǒng)。由于產(chǎn)品的截面變形曲線的斜率較小,即壓下裝置的運(yùn)動(dòng)速度遠(yuǎn)小于拉拔機(jī)構(gòu)的運(yùn)動(dòng)速度。所以即使拉拔方向采取開環(huán)控制,也可獲得期望的控制效果。
2.4控制算法
采用智能控制算法對(duì)電液伺服系統(tǒng)已有成功的報(bào)道[1] ,對(duì)軋機(jī)這類具有雙坐標(biāo)的電液伺服系統(tǒng),也選擇了多模態(tài)仿人智能控制算法。軋機(jī)的液壓伺服系統(tǒng)具有大流量、高壓力且拉拔方向運(yùn)動(dòng)的最高速度為30m/min,控制對(duì)象有一定的非線性、時(shí)變性。在設(shè)計(jì)有效的控制算法時(shí),首先應(yīng)考慮控制系統(tǒng)的實(shí)時(shí)性,這要求控制系統(tǒng)的結(jié)構(gòu)不應(yīng)該很復(fù)雜的,其決策和推理應(yīng)是快速的。
多模態(tài)控制就是在控制過程中根據(jù)系統(tǒng)不同的特征狀態(tài),控制器采用不同的控制策略和控制模式的一種控制算法。特征狀態(tài)是指一些反映系統(tǒng)特性、特征變化以及所處狀態(tài)的特征量的集合,用Gi表示。所有的特征狀態(tài)構(gòu)成一個(gè)特征狀態(tài)集,用G表示。則有
G=<G1, G2,…,Gm>
其中 Gi=(Gi1,Gi2,…,Gih) (i=1,2,…,m)
控制模式用Ai表示,所有的控制模式構(gòu)成了多模態(tài)控制器的控制模式集,用A表示。
A=<A1,A2, …,Am>
其中 Ai=U=f(Gij) (i=1,2,…,m;j=1,2,…,h)
控制的實(shí)現(xiàn)就是由G到A推理過程的實(shí)現(xiàn)。可由產(chǎn)生式規(guī)則IF G THEN A來表達(dá)。
為了獲得良好的實(shí)時(shí)性,同時(shí)也考慮控制精度的要求,應(yīng)盡可能選擇較少的特征狀態(tài)。考慮控制系統(tǒng)的穩(wěn)定性,選取誤差及其一階導(dǎo)數(shù)為基本特征量,經(jīng)過這樣的處理及大量的人-機(jī)在線學(xué)習(xí)的基礎(chǔ)上,總結(jié)出下列三種基本的特征狀態(tài)和相應(yīng)的控制模式。
其中U(n)為控制量的第n次輸出值;U0為控制量在誤差過零時(shí)的保持值;b1,b2為常數(shù);Kp和K分別為比例增益及抑制系數(shù);Kd,Ki,Td,Ti分別為微分和積分抑制系數(shù)及時(shí)間常數(shù);T為采樣間隔;Em(1)為第一次誤差峰值;EI為G2狀態(tài)下的區(qū)間積分值。
文獻(xiàn)[3]給出了控制對(duì)象的模型及仿人智能控制算法的仿真實(shí)驗(yàn)結(jié)果及與PID算法控制效果比較,從實(shí)驗(yàn)結(jié)果分析采用智能控制算法解決液壓伺服系統(tǒng)的實(shí)時(shí)控制問題,能取得比PID控制算法更好的控制效果;控制器的設(shè)計(jì)不依賴對(duì)象的數(shù)學(xué)模型,對(duì)液壓系統(tǒng)參數(shù)變化不敏感,魯棒性強(qiáng);算法簡(jiǎn)單,控制系統(tǒng)實(shí)時(shí)性好。
3 軟件設(shè)計(jì)
控制軟件在DOS操作系統(tǒng)下運(yùn)行,采用C++語言模塊化設(shè)計(jì),分系統(tǒng)設(shè)置、自動(dòng)軋制、手動(dòng)操作、零點(diǎn)調(diào)試、工藝文件編輯修改、文件操作、顯示、統(tǒng)計(jì)、打印等模塊。中文圖形界面,操作簡(jiǎn)便,只須輸入軋制路徑即可生成工藝文件。軋機(jī)狀態(tài)及軋機(jī)運(yùn)動(dòng)曲線實(shí)時(shí)圖形顯示,通過修改系統(tǒng)中斷8實(shí)現(xiàn)對(duì)采樣、控制、顯示的多任務(wù)處理。
總之,對(duì)電液伺服系統(tǒng)的控制采用多模態(tài)智能控制算法可以取得較好的控制效果,具有控制策略靈活、算法簡(jiǎn)單等優(yōu)點(diǎn),不僅伺服跟蹤能力強(qiáng),而且對(duì)系統(tǒng)參數(shù)變化不敏感,魯棒性強(qiáng),控制效果好。軋機(jī)已于1997年12月試制成功,投入正式生產(chǎn)。軋機(jī)的軋制速度、精度、運(yùn)行可靠性等均達(dá)到設(shè)計(jì)要求。
參考文獻(xiàn)
1 陳燕慶.工程智能控制.西安:西北工業(yè)大學(xué)出版社,1991年
2 Zhou Qi Jian,Bai Jian Kuo.An Intelligent Controller of Novel Design,MICONEX'83 Proceedings of Multinational Instrumentation Conference
3 李祖民,萬文略.計(jì)算機(jī)電液控制系統(tǒng)中仿人智能控制的研究.四川兵工學(xué)報(bào),1997;18(3)