
0 引 言
汽車行駛記錄儀俗稱汽車黑匣子,是一種能夠?qū)囕v行駛速度、時(shí)間、里程以及其他狀態(tài)信息進(jìn)行記錄的電子裝置。行駛記錄儀能夠?qū)崟r(shí)地記錄車輛運(yùn)行和駕駛員駕駛活動(dòng)的有關(guān)信息,通過對(duì)車輛行駛速度、連續(xù)行駛時(shí)間、里程和其他運(yùn)行狀態(tài)等有關(guān)信息進(jìn)行檢查、監(jiān)控、反饋和互動(dòng)管理,能夠有效地實(shí)現(xiàn)對(duì)駕駛員的行駛時(shí)間、行車速度、行車路線等進(jìn)行全方位的約束和控制,遏制疲勞駕駛、車輛超速等嚴(yán)重交通違法行為,預(yù)防道路交通事故,規(guī)范車輛管理。統(tǒng)計(jì)資料表明,汽車黑匣子的使用,使交通事故率降低了37 %~52 %,大大減少了人員傷亡和財(cái)產(chǎn)損失,產(chǎn)生了顯著的社會(huì)效益和經(jīng)濟(jì)效益。2003 年10 月,公安部交通安全產(chǎn)品質(zhì)量監(jiān)督檢測(cè)中心發(fā)布了汽車行駛記錄儀的國家標(biāo)準(zhǔn)GB1 T1905622003 。汽車“黑匣子”無疑將成為一種新的規(guī)范,隨著車輛的不斷增多,交通不斷擁擠,為了確保交通安全,將來會(huì)實(shí)施強(qiáng)制安裝行駛記錄儀。
1 “黑匣子”的分類
由于各研制生產(chǎn)廠家的出發(fā)點(diǎn)不同,因而產(chǎn)品的類型不同,產(chǎn)品結(jié)構(gòu)形式也不盡相同。目前市場(chǎng)上的記錄儀己形成了一個(gè)種類繁多、性能不一的產(chǎn)品格局。汽車行駛記錄儀根據(jù)其功能不同可以分為單一型、事故型、管理型、綜合管理型和3G型。
3G型是從軟件、硬件和系統(tǒng)功能上進(jìn)行了優(yōu)化設(shè)計(jì),以綜合管理為主要目地而開發(fā)的新一代汽車行駛記錄儀。主要特征是多通道數(shù)據(jù)采集處理,全程連續(xù)記錄,大容量存儲(chǔ)卡和強(qiáng)大的綜合管理軟件系統(tǒng),實(shí)現(xiàn)資源共享。此類型記錄儀利用多通道數(shù)據(jù)采集處理平臺(tái)、GPS 衛(wèi)星定位儀、大容量數(shù)據(jù)存儲(chǔ)卡、日趨成熟的地理信息系統(tǒng)和后臺(tái)綜合管理平臺(tái)軟件等強(qiáng)有力的現(xiàn)代化技術(shù)手段,重點(diǎn)針對(duì)營(yíng)運(yùn)和特種車輛的綜合化管理目標(biāo),來完成車輛綜合化管理進(jìn)程。可通過在微機(jī)軟件介面上重放的全程連續(xù)記錄曲線和各開關(guān)傳感器的連續(xù)狀態(tài),對(duì)車輛的營(yíng)運(yùn)、安全、質(zhì)量等綜合指標(biāo)進(jìn)行強(qiáng)有力的全程監(jiān)控,根據(jù)需求打印統(tǒng)計(jì)圖表,并采用動(dòng)態(tài)分析方式,為駕駛員的安全駕駛提供極高價(jià)值的參考。
本文介紹的就是基于ARM 的3G型汽車“黑匣子”的設(shè)計(jì)。
2 系統(tǒng)總體設(shè)計(jì)
本系統(tǒng)包括記錄儀車載端主機(jī)和監(jiān)控軟件組成。其中主機(jī)采用TI 公司32 位的RISC 微處理器TMS470R1A256 作為主控制器,包括基本記錄模塊、顯示模塊、打印機(jī)模塊、GPS 模塊、GPRS 模塊、數(shù)據(jù)通訊模塊。系統(tǒng)整體設(shè)計(jì)框圖如圖1 所示。

圖1 系統(tǒng)原理框圖
系統(tǒng)通過TMS470R1A256 對(duì)外部模擬信號(hào)輸入、數(shù)字信號(hào)輸入以及開關(guān)量輸入三種信號(hào)分別進(jìn)行采集。需要保存的數(shù)據(jù)經(jīng)過處理后存儲(chǔ)于內(nèi)部大容量存儲(chǔ)器中,實(shí)時(shí)數(shù)據(jù)(如實(shí)時(shí)車速、實(shí)時(shí)時(shí)問) 及報(bào)警信號(hào)等可通過顯示面板輸出顯示。GPS模塊對(duì)經(jīng)緯度,速度進(jìn)行測(cè)量,通過GPRS 實(shí)現(xiàn)遠(yuǎn)程監(jiān)控和實(shí)時(shí)跟蹤。
3 系統(tǒng)硬件設(shè)計(jì)
3. 1 TMS470R1A256
TMS470R1A256 是TI TMS470R1 x 通用16/32 位精簡(jiǎn)指令( RISC) 微控制器的系列產(chǎn)品。
TMS470R1A256 主要包含以下資源: 256 KBFlash、12 KB SRAM、零管腳鎖相環(huán)(ZPLL) 時(shí)鐘模塊、模擬看門狗(AWD) 定時(shí)器、實(shí)時(shí)中斷(RTI) 、串行外圍接口( SPI) 、串行通信接口( SCIx) 、標(biāo)準(zhǔn)CAN 控制器( SCC) 、二類串行接口(C2Sib) 、外部時(shí)鐘分頻器( ECP) ,10 位多緩沖ADC(MibADC) 、16 輸入通道、高端定時(shí)器( HET) ,多達(dá)49 個(gè)I/ O口和一個(gè)只輸入口。
TMS470R1A256 的Flash 存儲(chǔ)器是非易失性的、電可擦除的,可編程的存儲(chǔ)器,并具有32 位寬的數(shù)據(jù)總線接口。Flash 操作以系統(tǒng)時(shí)鐘頻率進(jìn)行, 可達(dá)24MHz.在管道模式下, 頻率可達(dá)48 MHz.
SCI 是全雙工的、串行I/ O 接口,實(shí)現(xiàn)了CPU與采用標(biāo)準(zhǔn)不歸零制(NRZ) 格式的外圍設(shè)備間的異步通訊。SCC 利用串行的、多主機(jī)通信協(xié)議實(shí)現(xiàn)了高效的分布式實(shí)時(shí)控制和高達(dá)1Mbit/ s 的穩(wěn)定通訊。SCC 是高噪聲和惡劣環(huán)境中,要求可靠串行通信和多道通訊應(yīng)用的理想選擇。C2Sib 使TMS470R1A256 可以在遵循SAEJ I850 協(xié)議標(biāo)準(zhǔn)的二類網(wǎng)絡(luò)中發(fā)送與接收信息。
3. 2 TMS470R1A256 與MC33993 之間的通信
美國MO TOROLA 公司推出的可編程多路開關(guān)檢測(cè)接口集成電路MC33993 可檢測(cè)多達(dá)22 路的開關(guān)量輸入信號(hào),并可將檢測(cè)到的多路開關(guān)狀態(tài)(三態(tài)) 信號(hào)通過該芯片的SPI 口傳送給MCU 。此外,該器件還具有22 路模擬多路開關(guān)功能,可用以讀取多路模擬輸入信號(hào)。該模擬輸入信號(hào)經(jīng)緩沖器可由模擬多路開關(guān)輸出以供MCU 讀取。并且MC33993 可使得包括MCU 在內(nèi)的整個(gè)系統(tǒng)能在一個(gè)較低的靜態(tài)電流下工作這對(duì)遠(yuǎn)程監(jiān)控之類的系統(tǒng)非常重要,因?yàn)閷?duì)它們而言,電流損耗是重要的設(shè)計(jì)考慮。因此,本設(shè)計(jì)選用MC33993 作為多路開關(guān)檢測(cè)接口電路。
系統(tǒng)中MC33993 采用SPI 與MCU 實(shí)現(xiàn)硬件連接,如圖2 所示:當(dāng)外部有開關(guān)量輸入,狀態(tài)發(fā)生改變時(shí), MC33993 會(huì)發(fā)出中斷信號(hào)IN T 給TMS470R1A256 , TMS470R1A256 響應(yīng)中斷讀取開關(guān)量輸入狀態(tài),從而提高M(jìn)CU 的工作效率。

圖2 MC33993 與TMS470R1A256 的硬件連接。
3. 3 TMS470R1A256 與FM24L256 之間的通信
在汽車行駛記錄儀行業(yè)中,數(shù)據(jù)安全保存是最重要的。隨著記錄儀的發(fā)展,保存的數(shù)據(jù)量越來越大,這就需要大容量的存儲(chǔ)器,而大容量的EEPROM 指標(biāo)不是很高,尤其是擦寫次數(shù)和速度影響電能表自身的質(zhì)量。FM24L256 是由RAMTRON公司研制的新型存儲(chǔ)器,它的核心技術(shù)是鐵電晶體材料,擁有隨即存取記憶體和非易失性存貯產(chǎn)品的特性。FM24L256 和A T24C256 容量等同,總線結(jié)構(gòu)兼容, 但FM24L256 的性能指標(biāo)遠(yuǎn)大于A T24C256 。
FM24L256 的通訊方式是雙向兩線協(xié)議,腳位少,占用線路板空間小。圖3 描述了FM24L256 與MCU 硬件連接方式。

圖3 FM24L256 與TMS470RIA256 的硬件連接
3. 4 TMS470R1A256 與SL811HS 之間的通信
本系統(tǒng)中USB 的主機(jī)通過主機(jī)控制器與USB設(shè)備進(jìn)行數(shù)據(jù)傳輸。USB 主機(jī)應(yīng)當(dāng)具有: 檢測(cè)USB 設(shè)備的插拔;管理USB 主機(jī)與USB 設(shè)備之間的控制流;管理USB 主機(jī)與設(shè)備間的數(shù)據(jù)流和收集USB 主機(jī)的狀態(tài)等功能。
SL811HS 是CYPRESS 公司生產(chǎn)的、可支持全速數(shù)據(jù)傳輸?shù)腢SB 控制芯片,且內(nèi)含USB 主從控制器,支持全速、低速數(shù)據(jù)傳輸,并能自動(dòng)識(shí)別低速或全速設(shè)備。SL811HS 所提供的接口遵從USB1. 1 標(biāo)準(zhǔn),可與TMS470R1A256 微處理器相連。SL811HS 的數(shù)據(jù)接口與微處理器進(jìn)行接口可提供8 位數(shù)據(jù)I/ O 或雙向DMA 通道,并能以從機(jī)操作方式支持DMA 數(shù)據(jù)傳輸。SL811HS 內(nèi)部有一個(gè)256 字節(jié)的RAM ,可用做控制寄存器或數(shù)據(jù)緩沖器。SL811HS 與TMS470R1A256 的硬件連接方式如圖4 所示。
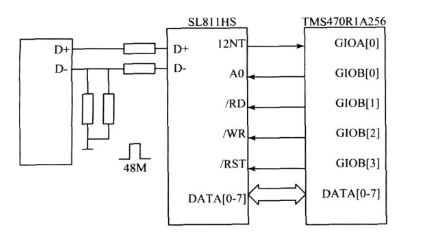
圖4 SL811HS 與TMS470R1A256 的硬件連接。
3. 5 TMS470R1A256 與HOLUXGR285 之間的通信
HOLUXGR285 智能型衛(wèi)星接收模組,采用美國瑟孚公司所設(shè)計(jì)的第二代衛(wèi)星定位接收芯片,是一個(gè)完整的衛(wèi)星定位接收器。具備全方位功能,能滿足專業(yè)定位的嚴(yán)格要求與個(gè)人消費(fèi)需求。適用范圍從汽車導(dǎo)航、保安系統(tǒng)、地圖制作等。
HOLUXGR285 通過RS2232 , TTL 與其它電子設(shè)備溝通,并以內(nèi)建充電電池,存貯衛(wèi)星資料。
其耗電量低,且能同時(shí)追蹤12 顆定位衛(wèi)星的訊號(hào),每0. 1 秒接收一次,每秒更新一次定位信息。
HOLUXGR285 與TMS470R1A256 均為3.3V 供電,故無需電平轉(zhuǎn)換便可通過串行通訊口實(shí)現(xiàn)數(shù)據(jù)交換。硬件連接如圖5 所示。
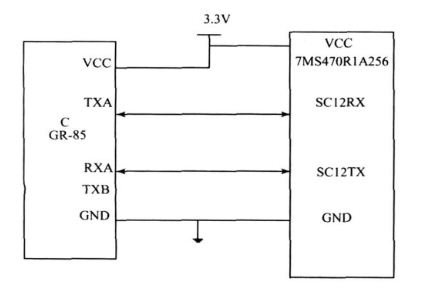
圖5 HOLUXGR285 與TMS470R1A256 的硬件連接
3. 6 TMS470R1A256 與Benq M22 之間的通信
Benq M22 是一款內(nèi)嵌TCP/ IP 協(xié)議棧,支持GSM/ GPRS CLASS4 , 可工作在EGSM900MHz ,DCS 1800MHz ,PCS 1900MHz ,可以支持?jǐn)?shù)據(jù)業(yè)務(wù)的透明和非透明傳輸。從封裝上來說,M22 使用連接座式接口,模塊上自帶天線MMCX 接頭。由于支持GPRS 甚至擁有嵌入式的TCP/ IP ,可以用于實(shí)時(shí)性要求較高,數(shù)據(jù)量相對(duì)較大,傳輸速度相對(duì)較快的汽車行駛記錄儀中。
Benq M22 和上位機(jī)的通訊數(shù)據(jù)接口為UART ,電平為TTL/ CMOS , 波特率為標(biāo)稱的300~115200bp s 的自適應(yīng)波特率,只要是這個(gè)區(qū)間的標(biāo)稱波特率,模塊自動(dòng)識(shí)別,無須用戶去干預(yù),可以接成全串口或者半串口通訊。所謂的全串口,是指DB9 的九條線都需要接上,所謂的半串口則只接RXD , TXD 和GND 就可以進(jìn)行通訊了。本系統(tǒng)采用半雙工模式,則模塊的RXD 可以直接連接TMS470R1A256 的TXD ,模塊的TXD 可以直接連接TMS470 R1A256 的RXD ,如圖6 所示。
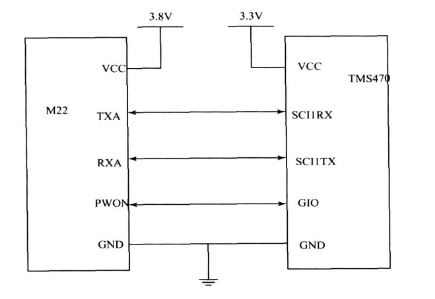
圖6 M22 與TMS470R1A256 硬件連接
4 系統(tǒng)軟件設(shè)計(jì)
系統(tǒng)上電后,首先對(duì)系統(tǒng)進(jìn)行初始化。然后進(jìn)行自檢,自檢范圍包括數(shù)據(jù)存儲(chǔ)器、時(shí)鐘和I/ O 口,自檢后根據(jù)自檢結(jié)果在顯示器上顯示相關(guān)信息。
如果自檢不通過,顯示“自檢不正常”和錯(cuò)誤代碼。
自檢通過后,然后進(jìn)入駕駛員身份認(rèn)證,通過后,LCD 顯示相關(guān)數(shù)據(jù),等待數(shù)據(jù)刷新。系統(tǒng)主程序流程圖如圖7 所示。
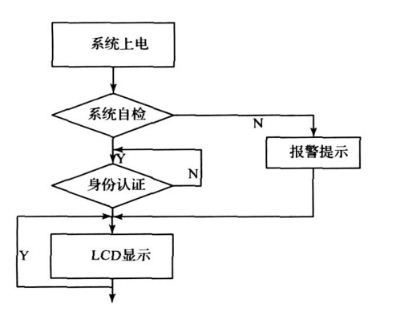
圖7 系統(tǒng)主程序流程圖
4. 1 數(shù)據(jù)采集
記錄儀讀取到原始數(shù)據(jù)后,根據(jù)脈沖量和車輛特征系數(shù)等能夠計(jì)算出總累計(jì)行駛里程、最近2 個(gè)日歷天的累計(jì)行駛里程、最近360 小時(shí)內(nèi)的累計(jì)行駛里程、每200 毫秒的速度和每分鐘的速度。
記錄儀采集的脈沖來自于速度傳感器,該速度傳感器每轉(zhuǎn)產(chǎn)生8 個(gè)脈沖,而車輛在每公里使速度傳感器旋轉(zhuǎn)的轉(zhuǎn)數(shù)由車輛特征系數(shù)決定。記錄儀根據(jù)所記錄的脈沖數(shù),可以得到車輛行駛的里程。
由脈沖數(shù)計(jì)算出行駛速度,只要先由脈沖數(shù)計(jì)算得到里程數(shù),再除以時(shí)間,即可得到速度。
4. 2 GPRS 設(shè)計(jì)
M22 支持GPRS CLASS4 , 即下行速度42. 8 Kbp s ,上行速度21. 4 Kbp s.同時(shí),M22 也支持嵌入式的TCP/ IP 協(xié)議。這個(gè)嵌入式的TCP/ IP協(xié)議解決了從命令模式連接到數(shù)據(jù)傳輸模式的一個(gè)比較復(fù)雜的過程。
因?yàn)橛辛饲度胧降腡CP/ IP ,所以可以實(shí)時(shí)的傳輸大量汽車記錄數(shù)據(jù),實(shí)現(xiàn)實(shí)時(shí)監(jiān)控車輛的運(yùn)行情況。使用TCP 協(xié)議進(jìn)行數(shù)據(jù)通信時(shí),必須要經(jīng)過三個(gè)階段,第一個(gè)階段是連接建立階段,第二個(gè)階段是數(shù)據(jù)收發(fā)階段,第三個(gè)階段是連接釋放階段。
本系統(tǒng)中發(fā)送短消息采用而PDU 模式,因?yàn)樗粌H支持中文短信,也能發(fā)送英文短信。PDU模式收發(fā)短信可以使用3 種編碼: 72bit 、82bit 和UCS2 編碼。
5 結(jié) 論
本設(shè)計(jì)是在傳統(tǒng)記錄儀上,添加GPS , GPRS模塊,并對(duì)該系統(tǒng)進(jìn)行測(cè)試的結(jié)果是能夠?qū)崿F(xiàn)精確定位(民用標(biāo)準(zhǔn)) 、遠(yuǎn)程監(jiān)控、電子狗及數(shù)據(jù)傳輸?shù)裙δ埽瑢?shí)現(xiàn)了基本記錄儀與GPS 導(dǎo)航一體化,滿足系統(tǒng)的設(shè)計(jì)要求。