
摘要:提出一種多功能汽車記錄儀的設(shè)計(jì)方案,系統(tǒng)采用AT91SAM9260型ARM處理器為控制器,Linux操作系 統(tǒng),K91G08UOB型Nand Flash為存儲(chǔ)介質(zhì),通過(guò)ET_318 SiRF StarⅢGPS芯片組接收GPS信號(hào)進(jìn)行定位,而GPRS模塊采用SIM300C傳輸數(shù)據(jù)。該汽車記錄儀能夠?qū)崟r(shí)記錄監(jiān)測(cè)汽車行駛狀態(tài)、位置,通過(guò) GPRS將行駛記錄及當(dāng)前信息上傳至服務(wù)器,實(shí)現(xiàn)遠(yuǎn)程監(jiān)控,具備超速、疲勞駕駛報(bào)警功能。數(shù)據(jù)可以通過(guò)USB或RS-232串口上傳至上位機(jī)。經(jīng)測(cè)試該記 錄儀性能穩(wěn)定可靠。
關(guān)鍵詞:ARM;GPS;GPRS;汽車行駛記錄儀
汽車行駛記錄儀(汽車黑匣子)是一種使用在汽車上的數(shù)字式電子記錄裝置,它可以對(duì)汽車的行駛速度、時(shí)間、里程及剎車等狀態(tài)信息進(jìn)行存儲(chǔ)并通過(guò)USB或串口 導(dǎo)出數(shù)據(jù)。汽車記錄儀對(duì)約束駕駛員的不良駕駛行為,分析、鑒定道路交通事故,提高交通管理執(zhí)法水平和運(yùn)輸管理水平,保障車輛運(yùn)行安全具有重要作用。
當(dāng)前的汽車行駛記錄儀技術(shù)比較成熟,低端產(chǎn)品一般采用8位或16位單片機(jī)作為主處理器,中高端則采用32位的ARM處理器,但這些產(chǎn)品一般只能做到對(duì)本車 的記錄及監(jiān)控,車輛行駛記錄需逐車采集,不便于大型車隊(duì)和企業(yè)管理。這里提出一種基于GPS和GPRS的多功能汽車記錄儀的設(shè)計(jì)方案,該設(shè)計(jì)是在實(shí)現(xiàn)記錄 儀基本功能的基礎(chǔ)上,增加GPS和GPRS模塊,分別用于定位和數(shù)據(jù)遠(yuǎn)程傳輸,結(jié)合數(shù)據(jù)庫(kù)技術(shù)和相應(yīng)監(jiān)控管理軟件實(shí)現(xiàn)對(duì)車輛和司機(jī)全方位監(jiān)控、調(diào)度和管 理。
1 系統(tǒng)組成和主要功能
本系統(tǒng)主要包括汽車記錄儀終端、服務(wù)器和監(jiān)控管理軟件。其中汽車記錄儀終端包括信號(hào)采集、數(shù)據(jù)記錄、GPS和GPRS等部分。服務(wù)器接收記錄儀通過(guò)GPRS發(fā)送的數(shù)據(jù)并保存。監(jiān)控管理軟件對(duì)服務(wù)器的數(shù)據(jù)進(jìn)行統(tǒng)計(jì)、分析,得到超速駕駛、疲勞駕駛和行駛里程等信息。
記錄儀終編是整個(gè)系統(tǒng)的基礎(chǔ),其主要功能為:
1)實(shí)時(shí)定位功能 能夠?qū)崟r(shí)采集記錄車輛當(dāng)前所處的位置數(shù)據(jù),并把位置數(shù)據(jù)發(fā)送到監(jiān)控中心管理平臺(tái),在監(jiān)控平臺(tái)上顯示出車輛的行駛軌跡;監(jiān)控中心(監(jiān)控站)也可以發(fā)出指令尋找目標(biāo)車輛所在位置數(shù)據(jù);
2)運(yùn)營(yíng)限制區(qū)域設(shè)置功能 利用監(jiān)控平臺(tái)可以對(duì)運(yùn)營(yíng)車輛的行駛區(qū)域范圍做出限定,車輛一旦超出限定區(qū)域,監(jiān)控平臺(tái)就會(huì)發(fā)出報(bào)警;
3)泊車防盜功能 停車后按下泊車防盜按鈕,車輛就進(jìn)入泊車防盜狀態(tài)。如車輛非法移動(dòng),監(jiān)控平臺(tái)立即發(fā)送短信至主控手機(jī)上,并報(bào)告當(dāng)前的車輛位置;
4)緊急求助報(bào)警 當(dāng)車輛遇劫或需要求助時(shí),駕駛?cè)藛T可通過(guò)按鍵向中心報(bào)警,同時(shí)向監(jiān)控中心發(fā)送車輛的經(jīng)度、緯度、行駛速度、方向、時(shí)間等信息;
5)車輛全程行駛數(shù)據(jù)記錄 車載終端全程采集、記錄車輛行駛和司機(jī)操作的全部數(shù)據(jù)并發(fā)給數(shù)據(jù)中心。其中包括:車輛的時(shí)間、速度、里程、狀態(tài)、位置、發(fā)動(dòng)機(jī)轉(zhuǎn)速等數(shù)據(jù)。利用一體機(jī)記錄 下的全程行駛數(shù)據(jù),監(jiān)控平臺(tái)提供每條行駛記錄全程時(shí)間一速度一狀態(tài)曲線和里程一速度一狀態(tài)曲線。通過(guò)這些曲線查看司機(jī)的全部駕駛過(guò)程;
6)超速報(bào)警和超速記錄 車載終端可以按預(yù)先設(shè)置的速度限制進(jìn)行超速報(bào)警。當(dāng)車輛行駛速度超過(guò)設(shè)定值時(shí),車載終端就以聲/光方式報(bào)警,提醒司機(jī)及時(shí)減速。同時(shí)把車輛超速信息發(fā)送到監(jiān)控中心;
7)司機(jī)疲勞駕駛報(bào)警和記錄 車載終端能記錄駕駛員連續(xù)駕駛時(shí)間超過(guò)4 h的所有疲勞駕駛數(shù)據(jù);
8)事故疑點(diǎn)記錄 車載終端以0.2 s的時(shí)間間隔記錄車輛停車前20 s時(shí)間段內(nèi)和實(shí)時(shí)時(shí)間相對(duì)應(yīng)的車輛行駛的速度值、剎車信號(hào)和其他車輛狀態(tài)信號(hào)作為事故疑點(diǎn)數(shù)據(jù)。存儲(chǔ)最近2個(gè)月的所有事故疑點(diǎn)數(shù)據(jù);
9)車輛油位監(jiān)控功能 車載終端可以對(duì)油箱油位進(jìn)行實(shí)時(shí)監(jiān)控。當(dāng)油位發(fā)生異常變化時(shí),車載終端可以實(shí)時(shí)記錄變化量并向監(jiān)控中心發(fā)送異常變化數(shù)據(jù);
10)視頻監(jiān)控功能 可外接兩路攝像頭,將車內(nèi)外情況抓拍照片后傳送到監(jiān)控中心;
11)駕駛員身份識(shí)別功能 車載終端利用IC卡方式實(shí)現(xiàn)駕駛?cè)藛T身份識(shí)別功能。使用和車載終端配套使用的管理軟件可以把駕駛員基本信息設(shè)置在IC卡中,其中包括:“駕駛員姓名”、“駕駛員代碼”、“駕駛證號(hào)碼”。把設(shè)置好的IC卡插入記錄儀,記錄儀自動(dòng)對(duì)司機(jī)進(jìn)行識(shí)別;
12)數(shù)據(jù)通信功能 車載終端通過(guò)內(nèi)置GPRS通訊模塊實(shí)現(xiàn)和監(jiān)控中心的數(shù)據(jù)互通;車載終端設(shè)有標(biāo)準(zhǔn)USB接口,使用U盤可以把車載終端記錄的全部數(shù)據(jù)取出;通過(guò)車載終端的USB口可以對(duì)車載終端進(jìn)行參數(shù)設(shè)置也可以對(duì)車載終端進(jìn)行程序裝載;
13)讀取短信功能 讀取監(jiān)控平臺(tái)發(fā)送的任意短信內(nèi)容。
2 記錄儀硬件設(shè)計(jì)
記錄儀總體結(jié)構(gòu)框圖如圖l所示,主要包括ARM處理器、GPS模塊、GPRS模塊、信號(hào)采集電路、實(shí)時(shí)時(shí)鐘電路、語(yǔ)音報(bào)警電路及數(shù)據(jù)存儲(chǔ)電路。

2.1 主處理器
為了滿足系統(tǒng)對(duì)實(shí)時(shí)性、大量數(shù)據(jù)處理、GPS信號(hào)接收、GPRS發(fā)送數(shù)據(jù)控制等各方面的要求,選用32位ARM處理器AT91SAM9260。AT91SA-M9260采用ARM926EJ-S內(nèi)核,外部總線接口包含諸多控制器,用于控制SDRAM以及包括NAND Flash和Compact Flash在內(nèi)的靜態(tài)存儲(chǔ)器,7路US-ART、1個(gè)雙線接口(TWI)以及4通道10位A/D轉(zhuǎn)換器。
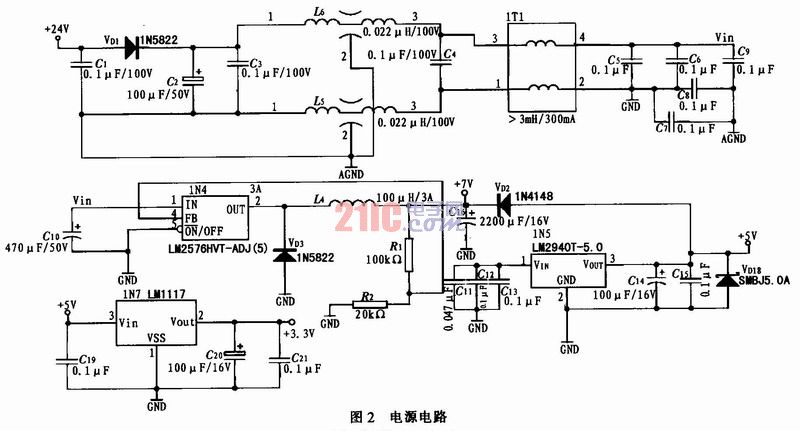
2.2 電源電路
目前汽車電瓶電壓在9~36 V之間,而且由于車輛本身環(huán)境影響,汽車供電電壓不穩(wěn)定,存在各種干擾,所以本系統(tǒng)采用三級(jí)電壓轉(zhuǎn)換電路,如圖2所示。外部電源分別經(jīng)LM2576HVT-ADJ、LM2940-5.0和LMlll7轉(zhuǎn)換為7、5和3 V,供給相應(yīng)模塊。其中第一級(jí)LM2576HVT-ADJ將7-40 V電壓轉(zhuǎn)換至7 V,使本系統(tǒng)可以應(yīng)用到任何車輛。在電源輸入電壓轉(zhuǎn)換模塊前通過(guò)LC濾波,可以有效地濾除交流干擾,各電源轉(zhuǎn)換器后端均通過(guò)100和O.1μF電容并聯(lián)接地消除紋波電壓,保證系統(tǒng)供電穩(wěn)定。經(jīng)過(guò)測(cè)試該電路可以穩(wěn)定輸出5和3.3 V電壓。
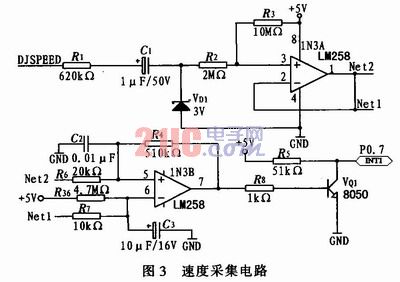
2.3 速度采集電路
獲得準(zhǔn)確的速度是記錄儀正常工作的基礎(chǔ)。大部分汽車都安裝有速度傳感器,車輪每轉(zhuǎn)動(dòng)一周則會(huì)輸出一定數(shù)量的脈沖,準(zhǔn)確判斷這些脈沖是關(guān)鍵。本系統(tǒng)采用的速 度采集電路如圖3所示,首先通過(guò)前端的RC濾波去除高頻干擾,經(jīng)過(guò)一個(gè)跟隨器,再通過(guò)比較電路輸出,控制后端的三極管VQ1的通斷,產(chǎn)生穩(wěn)定的脈沖信號(hào)。
2.4 GPS
GPS是本系統(tǒng)實(shí)現(xiàn)定位的核心部分,采用Gloabalsat的ET-318 SiRF StarⅢGPS芯片組,該模塊具有靈敏度高(追蹤靈敏度:-159 dbm),低信號(hào)下快速TTFF(首次定位時(shí)間),20通道全視野跟蹤,速度精度0.1 m/s,支持NMEA0183和SiRF二進(jìn)位協(xié)議,通過(guò)串口固定輸出NMEA0183規(guī)定的數(shù)據(jù)信息。通信參數(shù):波特率為4 800 b/s,數(shù)據(jù)位為8 bit,停止位為1 bit。無(wú)奇偶校驗(yàn)。ARM接收其中的RMC(推薦定位信息),獲得時(shí)間、經(jīng)緯度、地面速度、地面航向等信息。
2.5 GPRS
本系統(tǒng)每1O s鐘通過(guò)GPRS將當(dāng)前速度、經(jīng)緯度、方向和時(shí)間發(fā)送到服務(wù)器,管理軟件讀取這些信息就可以監(jiān)測(cè)車輛的當(dāng)前狀態(tài)。GPRS模塊采用的是SIM300C,它 體積小,采用DIP板對(duì)板連接器,低功耗,高速傳輸語(yǔ)音、SMS(短信)、數(shù)據(jù)和傳真信息,最關(guān)鍵的是它內(nèi)嵌強(qiáng)大的T-CP/IP協(xié)議棧,支持標(biāo)準(zhǔn)AT指 令集。本系統(tǒng)通過(guò)SIM300C建立TCP管道傳輸數(shù)據(jù)。建立過(guò)程如下:
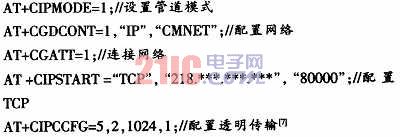
其中1 024規(guī)定每次傳輸量最大不超過(guò)1 KB。
2.6 語(yǔ)音模塊
系統(tǒng)在超速行駛、疲勞駕駛時(shí),相應(yīng)的高亮度LED閃爍,同時(shí)啟動(dòng)語(yǔ)音報(bào)警功能,發(fā)出“超速,請(qǐng)減速”的警告語(yǔ)音,而且記錄儀能播放監(jiān)控平臺(tái)發(fā)送的短信的內(nèi)容即TTS(從文本到語(yǔ)音)。該記錄儀采用語(yǔ)音天下的第二代語(yǔ)音合成器OSYNO 6288。它兼容GB2312、GBK、BIG5和Unicode等4種內(nèi)碼格式文本的合成,可以在9 600,19 200、38 400 b/s等波特率下正常工作,增加多種控制命令。比如合成、停止合成、
暫停合成、繼續(xù)合成、改變波特率等,可以自動(dòng)識(shí)別詞組,多音字。語(yǔ)音通過(guò)PWM(脈寬調(diào)制)輸出至喇叭。為與監(jiān)控軟件、數(shù)據(jù)庫(kù)和GPRS模塊兼容,采用通用性更好的Unicode碼,通信參數(shù):波特率為4 800 b/s,數(shù)據(jù)位為8 bit,停止位為1 bit無(wú)奇偶校驗(yàn),OSYNO 6288內(nèi)置有功放,軟件調(diào)節(jié)音量至11級(jí),外接8 Ω/0.5 W喇叭,播放聲音洪亮、清晰,即使在較為嘈雜的環(huán)境下也可以清楚聽(tīng)到播放內(nèi)容。
2.7 數(shù)據(jù)存儲(chǔ)器
汽車行駛記錄儀是在汽車行駛過(guò)程中對(duì)汽車各種狀態(tài)進(jìn)行記錄的電子裝置,各種狀態(tài)數(shù)據(jù)存儲(chǔ)是汽車行駛記錄儀的重要部分。此前大多設(shè)計(jì)均采用Flash和鐵電 存儲(chǔ)器并用的方式。但是對(duì)于實(shí)時(shí)操作系統(tǒng)Linux只要采用一片F(xiàn)lash就可以滿足需要。目前Linux操作系統(tǒng)可以很好支持 NandFlash,AT91sam9260支持Nand Flash啟動(dòng),并且與之相應(yīng)的yaffs2文件系統(tǒng)已經(jīng)成熟,保證了數(shù)據(jù)的準(zhǔn)確性。由于本系統(tǒng)需要保存大量數(shù)據(jù):GPS定位信息、疑點(diǎn)記錄、行駛記錄、 斷電記錄、疲勞駕駛記錄、油位等,所以采用K9F1G08UOB型128Mx2 K頁(yè)NandFlash存儲(chǔ)器。
2.8 油位傳感器
本系統(tǒng)加裝精確的油位傳感器,對(duì)油位實(shí)時(shí)記錄,并通過(guò)GPRS傳輸至監(jiān)控平臺(tái),車輛運(yùn)營(yíng)企業(yè)可以實(shí)時(shí)掌握車輛的油位情況,徹底杜絕司機(jī)偷油賣油,拉私活的情況發(fā)生。
車輛電環(huán)境復(fù)雜干擾多,因此采用電流型傳感器。本系統(tǒng)采用CR-606型電容式油位傳感器,當(dāng)油進(jìn)入容器引起傳感器殼體和感應(yīng)電極之間的變化,適用于任何不導(dǎo)電的液體,油位精度高,油位液在采集小于1 mm,測(cè)量誤差小于0.1%,標(biāo)準(zhǔn)輸出4~20 mA的線性電流信號(hào),經(jīng)過(guò)150Ω精密電阻轉(zhuǎn)換至0.6~3 V電壓信號(hào),通過(guò)AT91sam9260的A/D轉(zhuǎn)換模塊轉(zhuǎn)換為數(shù)字量并保存。
2.9 實(shí)時(shí)時(shí)鐘
主處理器AT91sam9260雖內(nèi)置時(shí)鐘,但是當(dāng)處理器斷電后,該實(shí)時(shí)時(shí)鐘所有寄存器的內(nèi)容將全部丟失。為此,系統(tǒng)需要外部實(shí)時(shí)時(shí)鐘。 PCF8563符合這一要求,PCF8563具有掉電檢測(cè)器,當(dāng)供電電壓低于某個(gè)值時(shí),秒寄存器中的某標(biāo)志位將置1,指明此時(shí)實(shí)時(shí)時(shí)鐘可能會(huì)產(chǎn)生不準(zhǔn)確的時(shí)鐘/日歷信息,從而避免了記錄儀對(duì)錯(cuò)誤時(shí)間的記錄。此外,PCF8563可以工作在1~5.5 V的寬電壓范圍內(nèi),具有體積小、外圍電路簡(jiǎn)單、運(yùn)行穩(wěn)定性、精度高、功耗低等優(yōu)點(diǎn),Linux內(nèi)核對(duì)其支持穩(wěn)定可靠,滿足本系統(tǒng)的要求。
2.10 通信接口
根據(jù)GB/T19056-2003,標(biāo)準(zhǔn)記錄儀應(yīng)至少配置2種標(biāo)準(zhǔn)接口:USB標(biāo)準(zhǔn)接口、標(biāo)準(zhǔn)RS-232型9針接口。通過(guò)RS-232串行口直接進(jìn)行數(shù) 據(jù)傳輸比較容易實(shí)現(xiàn),可靠性高。AT91sam9260的串行口經(jīng)電平轉(zhuǎn)換器MAX232轉(zhuǎn)換為EIA/TIA-232-E電平,從而提供標(biāo)準(zhǔn)的RS- 232接口。AT91sam
9260支持USB主從模式,也可直接外接USB接口。
3 汽車記錄儀軟件設(shè)計(jì)
汽車記錄儀是無(wú)人控制的,在汽車開(kāi)始運(yùn)行時(shí)自動(dòng)啟動(dòng),本系統(tǒng)采用Linux操作系統(tǒng),運(yùn)行過(guò)程為:汽車上電記錄儀啟動(dòng),開(kāi)始引導(dǎo)Bootstrap、Uboot,通過(guò)Bootloader調(diào)用Linux內(nèi)核,加載yaffs2文件系統(tǒng),自動(dòng)啟動(dòng)應(yīng)用程序。
3.1 主程序
應(yīng)用程序采用C語(yǔ)言編寫。主程序負(fù)責(zé)整個(gè)系統(tǒng)的初始化,硬件設(shè)備通過(guò)信號(hào)(軟中斷)與主程序交互數(shù)據(jù),完成相應(yīng)的操作,主程序流程如圖4所示。

3.2 GPRS數(shù)據(jù)發(fā)送
本系統(tǒng)設(shè)計(jì)記錄的數(shù)據(jù)包括行駛記錄,上電至掉電之間,每3 s保存一次時(shí)間、速度、狀態(tài)、GPS定位信息和角度;疑點(diǎn)記錄,保存每次停車前20 s內(nèi),每0.2 s的速度和狀態(tài)信息;斷電記錄,保存系統(tǒng)斷電時(shí)的時(shí)間;疲勞駕駛記錄,保存司機(jī)連續(xù)駕車超過(guò)4 h的起始時(shí)間。所有的記錄數(shù)據(jù)要求保存2個(gè)月,因此保存數(shù)據(jù)量大,相應(yīng)需要傳輸?shù)臄?shù)據(jù)量也大。
在GPRS傳輸數(shù)據(jù)之前對(duì)數(shù)據(jù)進(jìn)行壓縮并且在系統(tǒng)出現(xiàn)新記錄時(shí)進(jìn)行傳輸。在編譯busybox時(shí)選擇gzip功能,通過(guò)gzip對(duì)數(shù)據(jù)壓縮,一般壓縮比可達(dá)9:1。由于GPRS透明傳輸要求每次傳輸數(shù)據(jù)最大不超過(guò)1 KB,因此將需傳輸?shù)臄?shù)據(jù)分割為每包1 000字節(jié)的數(shù)據(jù),并為每包數(shù)據(jù)標(biāo)識(shí)ID號(hào)。
服務(wù)器接收端根據(jù)接收到的數(shù)據(jù)包lD重新組合數(shù)據(jù),通過(guò)解壓縮軟件解壓得到記錄儀的記錄數(shù)據(jù)。
3.3 斷電記錄的實(shí)現(xiàn)
在大型車隊(duì)及運(yùn)輸公司,司機(jī)為免受記錄儀的約束,往往在運(yùn)營(yíng)過(guò)程中對(duì)記錄儀非法斷電,使記錄儀不能正常工作,以此躲避監(jiān)控。因此本系統(tǒng)專門設(shè)計(jì)斷電記錄,對(duì)司機(jī)非法斷電的行為進(jìn)行監(jiān)督。系統(tǒng)啟動(dòng)時(shí)將當(dāng)前時(shí)鐘與上次停機(jī)時(shí)時(shí)鐘進(jìn)行對(duì)比,Linux從死機(jī)至重啟的時(shí)間應(yīng)在5 min以內(nèi),若對(duì)比時(shí)間超過(guò)5 min,說(shuō)明記錄儀長(zhǎng)時(shí)間斷電,將上次停機(jī)時(shí)間作為斷電記錄保存,并發(fā)送至服務(wù)器。
3.4 時(shí)間和速度校準(zhǔn)
ARM接收GPS的RMC信息。若GPS時(shí)間與當(dāng)前系統(tǒng)時(shí)間相差達(dá)到30 s,則以GPS時(shí)間為準(zhǔn)并校準(zhǔn)系統(tǒng)時(shí)間和硬件時(shí)鐘。當(dāng)前速度與GPS速度比較,若GPS速度連續(xù)30 s大于0,而速度采集電路接收始終為O,則判斷速度傳感器故障,并使用GPS速度作為系統(tǒng)當(dāng)前速度,并向監(jiān)控中心報(bào)警。
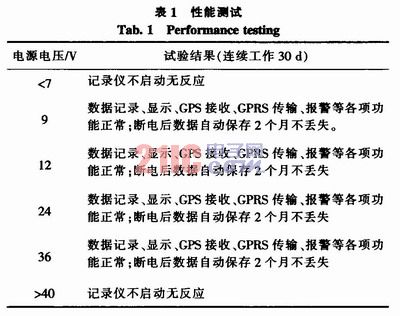
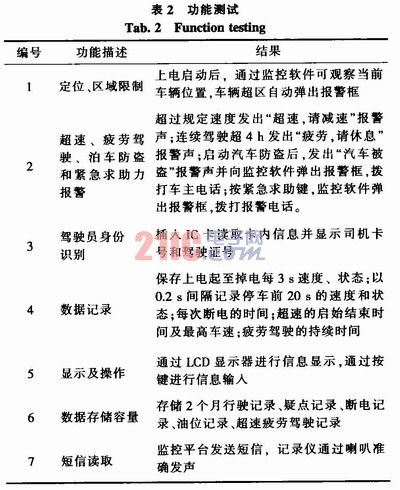
4 樣機(jī)測(cè)試
經(jīng)過(guò)努力,本系統(tǒng)已經(jīng)完成,并生產(chǎn)出樣機(jī)。通過(guò)樣機(jī)安裝在試驗(yàn)用車進(jìn)行各方面性能和功能測(cè)試。測(cè)試結(jié)果如表l,表2所示。
5 結(jié)論
該汽車記錄儀結(jié)合GPS和GPRS實(shí)現(xiàn)精確定位和遠(yuǎn)程數(shù)據(jù)傳輸,通過(guò)管理軟件可以實(shí)時(shí)獲取當(dāng)前車輛狀態(tài)信息,又能及時(shí)查看車輛行駛記錄, 在車輛實(shí)時(shí)告警與稽核、公安交警部門的事故處理發(fā)揮重要作用,增加斷電記錄和多種報(bào)警功能,即可以防搶防盜,又能滿足大中型車隊(duì)及企業(yè)對(duì)于車輛管理和司機(jī) 操作監(jiān)控的需要。