
汽車行業(yè)的快速發(fā)展促進(jìn)了汽車電子行業(yè)的發(fā)展,混合動力車型(Hybrid Electric Vehicle,HEV)作為汽車行業(yè)的新發(fā)展方向,受到了國家的重視。從技術(shù)、節(jié)能減排效果、產(chǎn)業(yè)化能力等諸多方面考慮,混合動力具備了傳統(tǒng)內(nèi)燃機(jī)和電動機(jī)的優(yōu)勢,將在較長一段時間內(nèi)占據(jù)優(yōu)勢。混合動力車輛技術(shù)避免了純電動車輛在電池技術(shù)和能源基礎(chǔ)設(shè)施上的不足,成為近期新型車輛研究開發(fā)的熱點。經(jīng)過國家“863計劃”的支持與發(fā)展,我國的混合動力車輛技術(shù)正在迅速邁向產(chǎn)業(yè)化。
1 混合動力控制系統(tǒng)
實現(xiàn)混合動力車共有三個關(guān)鍵因素:能夠?qū)ζ囘\(yùn)行狀態(tài)詳細(xì)監(jiān)控的系統(tǒng);分析監(jiān)控系統(tǒng)所獲取的信息,并發(fā)出相應(yīng)的控制命令;相比一般電子系統(tǒng),混合動力車電子控制系統(tǒng)工作在車內(nèi)非常惡劣的環(huán)境,電磁干擾、振動、灰塵等都會造成技術(shù)上的瓶頸,如圖1所示。

本文對混合動力車進(jìn)行了研究,系統(tǒng)地分析了混合動力車的各個重要組成部分的核心技術(shù),提出一種經(jīng)濟(jì)實用的混合動力車的控制系統(tǒng)的設(shè)計實例。該系統(tǒng)采用了先進(jìn)的計算機(jī)技術(shù)和總線技術(shù),集智能控制、信號采集、數(shù)據(jù)處理和通信于一體,控制實時性好,實現(xiàn)了整車控制智能化和多傳感器之間的有效融合。
2 動力控制策略系統(tǒng)
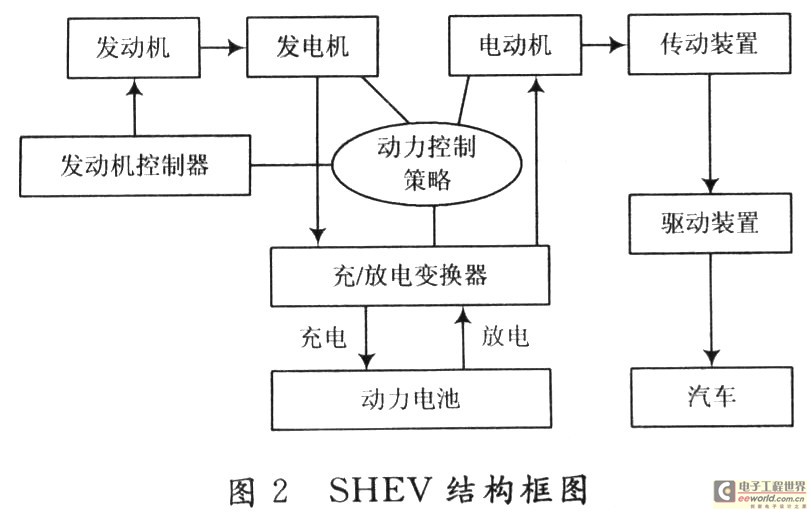
混合動力電動汽車由發(fā)動機(jī)和蓄電池共同提供動力,發(fā)動機(jī)和電動機(jī)可進(jìn)行不同組合得到不同的驅(qū)動方案,如:串聯(lián)、并聯(lián)及混聯(lián)。整車性能的好壞不僅與發(fā)動機(jī)和電動機(jī)等部件有關(guān),還與其控制策略和優(yōu)化方法有關(guān)。按照能源組合的方式,混合動力電動汽車可按動力驅(qū)動方式分為串聯(lián)式混合動力電動汽車(SHEV)和并聯(lián)式混合動力電動汽車(PHEV)。本文研究對象是SHEV。SHEV的特點適合城市行駛中頻繁起動、加速和低速運(yùn)行工況,可使發(fā)動機(jī)在最佳工況點附近穩(wěn)定運(yùn)轉(zhuǎn),通過調(diào)整蓄電池和電動機(jī)的輸出來達(dá)到調(diào)整車速的目的,從而提高在復(fù)雜工況下行駛的車輛的燃油經(jīng)濟(jì)性,同時降低排放。在電池的荷電狀態(tài)(SOC)較高時還可以關(guān)閉發(fā)動機(jī),只利用電機(jī)進(jìn)行功率輸出,使發(fā)動機(jī)避免在怠速和低速工況下運(yùn)行,提高發(fā)動機(jī)的效率,減少有害物質(zhì)的排放。SHEV的結(jié)構(gòu)如圖2所示。
混合動力車需根據(jù)不同的行車狀況,以及動力電池的實時參數(shù)來決定其相應(yīng)的控制策略。“動力控制策略系統(tǒng)”分析和處理來自運(yùn)行狀況監(jiān)控系統(tǒng)的數(shù)據(jù),判斷此時的電動機(jī)應(yīng)該處于發(fā)動機(jī)工作模式、動力電池工作模式,或者是協(xié)同工作模式,然后發(fā)出相應(yīng)的控制命令。研究表明,好的系統(tǒng)控制策略應(yīng)是使發(fā)動機(jī)工作在其最大負(fù)荷的50 %~65%,同時需要兼顧汽車的動力性。策略控制的一個重要依據(jù)是動力電池的SOC值,當(dāng)SOC值處于正常工作區(qū)(30%~75 %),動力電池放電電流處于20~65 A范圍內(nèi),如果此時駕駛員對汽車加速的要求低于30%,可采用動力電池驅(qū)動車輛。當(dāng)駕駛員對加速的要求為30%~65%,可利用此時發(fā)動機(jī)釋放的多余能量給動力電池充電。當(dāng)駕駛員對加速的要求為65%~80%,由發(fā)動機(jī)獨(dú)立驅(qū)動汽車,直到其最大輸出功率。當(dāng)加速要求大于80%,可由發(fā)動機(jī)和動力電池同時驅(qū)動車輛。
另外,需考慮到動力電池安全性和壽命,當(dāng)其SOC值變化超出了上述范圍,需及時合理地發(fā)出相應(yīng)的控制命令。當(dāng)SOC大于80%時,動力電池強(qiáng)制放電,控制系統(tǒng)需改變此時的動力混合度的比例,提高動力電池的占總輸出功率的比例,此時不再收回發(fā)動機(jī)產(chǎn)生的富裕能量。當(dāng)SOC小于20%,動力電池進(jìn)入強(qiáng)制充電模式,此時由發(fā)動機(jī)的輸出功率的一部分要用于動力電池充電,汽車此時完全由發(fā)動機(jī)驅(qū)動。