
??? 摘? 要: 介紹了ISO11783通信協(xié)議的基本特點,并給出了一種基于TMS320F2812 DSP實現(xiàn)的ISO11783總線ECU通信節(jié)點的軟硬件設(shè)計方案。
??? 關(guān)鍵詞: 通信技術(shù)? ISO11783? TMS320F2812? ECU? 農(nóng)業(yè)機械
?
??? 隨著拖拉機與自走式農(nóng)業(yè)機械" title="農(nóng)業(yè)機械">農(nóng)業(yè)機械向電子化方向發(fā)展,目前農(nóng)林車輛上的電子裝置也越來越多,而給農(nóng)業(yè)機械添加電子設(shè)備的必然結(jié)果是:要求這些電子設(shè)備之間能夠?qū)崿F(xiàn)相互通信。例如,拖拉機上的牽引力控制器可以和傳動機構(gòu)以及發(fā)動機的控制器之間進行通信,從而達到優(yōu)化性能的目的。電子通信用來協(xié)調(diào)車輛上的各個部件,允許信息在各部件之間共享,從而實現(xiàn)分布式控制。增加通信的費用只占整個電子化開發(fā)成本的一小部分,但卻可以給車輛帶來功能、生產(chǎn)效率和性能方面的重大改進[1]。
?? ?農(nóng)林車輛傳統(tǒng)的電氣系統(tǒng)大多采用點對點的單通信方式,相互之間少有聯(lián)系,其結(jié)果是造成龐大的布線系統(tǒng)[2]。有鑒于此,國際標準化組織根據(jù)現(xiàn)代農(nóng)業(yè)機械發(fā)展的需要,特別是精密農(nóng)業(yè)領(lǐng)域未來的發(fā)展趨勢,制定了農(nóng)林機械、拖拉機串行控制和數(shù)據(jù)通信的網(wǎng)絡(luò)總線協(xié)議標準,即ISO11783標準(通常稱為ISOBUS)。這個標準為在拖拉機為農(nóng)具之間統(tǒng)一交換數(shù)據(jù)和控制指令提供了技術(shù)可能,滿足了車輛各種電氣設(shè)備信息共享的要求,并對關(guān)于農(nóng)業(yè)機械的各種變量參數(shù)的定義和表示進行了規(guī)范,從而使不同原始設(shè)備制造商所開發(fā)的設(shè)備能夠做到互通互聯(lián)。本文主要對實現(xiàn)ISO11783總線通信的最小系統(tǒng)以及采用TI公司的TMS320F2812 DSP作為微處理器的ECU通信節(jié)點的軟硬件設(shè)計方案進行探討。
1 ISO11783總線特點
ISO11783參照SAE J1939、DIN 9684標準,以控制器局域網(wǎng)總線協(xié)議(即CAN 2.0B)作為網(wǎng)絡(luò)協(xié)議支持,規(guī)定了在拖拉機或農(nóng)具上懸掛或安裝的各種不同設(shè)備(如:任務(wù)管理器、虛擬終端、設(shè)備控制器、傳感器和執(zhí)行器)之間進行信息傳輸交換的方法和格式。
ISO11783的物理層標準用來實現(xiàn)電子控制單元(ECU)和網(wǎng)絡(luò)總線部分的電氣連接,與ISO11898規(guī)范兼容并采用符合該規(guī)范的CAN控制器及收發(fā)器。總線段最大長度為40米,數(shù)據(jù)傳輸率為250Kbps。ECU連接總數(shù)受限于總線的電氣負載能力,按照ISO11783物理層電氣參數(shù)規(guī)定,每段最多連接30個ECU。傳輸介質(zhì)為四芯雙絞線,其中兩條導(dǎo)線分別為CAN_H和CAN_L,由通信信號驅(qū)動;另外兩條導(dǎo)線為TBC_PWR和TBC_RTN,為總線段上的終端偏置電路(TBC)供電線。整個11783總線至少被分成兩個部分:應(yīng)用于拖拉機上自身各個功能器件之間通信的拖拉機總線及用于拖拉機所安裝的各個附加功能設(shè)備(如虛擬終端、任務(wù)控制器和GPS等)以及各個農(nóng)具ECU之間實現(xiàn)通信的設(shè)備總線[3]。其網(wǎng)絡(luò)結(jié)構(gòu)如圖1所示。
??????????????????????? 
??? ISO11783協(xié)議在CAN 2.0B協(xié)議的基礎(chǔ)上具體實現(xiàn)了應(yīng)用層" title="應(yīng)用層">應(yīng)用層, 將CAN 擴展幀封裝成一個單一的協(xié)議數(shù)據(jù)單元(PDU)。ISO11783PDU數(shù)據(jù)格式由七個部分構(gòu)成:優(yōu)先權(quán)、保留位、數(shù)據(jù)頁、PDU格式、特定PDU(目標地址、組擴展或?qū)S茫⒃吹刂泛蛿?shù)據(jù)域,如表1所示。這些域的信息由應(yīng)用層提供。在傳輸過程中,先將PDU分隔成一個或多個CAN 數(shù)據(jù)幀,然后通過物理介質(zhì)傳輸?shù)狡渌W(wǎng)絡(luò)掛接設(shè)備上。
???????????????????????? 
優(yōu)先權(quán)用于總線傳輸中優(yōu)化數(shù)據(jù)延遲,保留位留待將來擴展使用,數(shù)據(jù)頁為選擇參數(shù)組擴展的輔助頁位,PDU格式(PF)有PDU1和PDU2兩種,用來確定數(shù)據(jù)域?qū)?yīng)參數(shù)組編號。特定PDU(PS)的定義取決于PDU格式,若PF域的值小于240,則PS域是目標地址;若PF域的值在240~255之間。則PS為組擴展(GE)值。當PF=239時,為專用PDU1格式;PF=255時,為專用PDU2格式。使用兩種PDU 格式,不但能實現(xiàn)定向到特定目標地址的通信,還能提供盡可能多的參數(shù)組編號組合。已定義的專用PDU格式因制造商而異。源地址為消息發(fā)送設(shè)備在總線網(wǎng)絡(luò)中的地址[4]。
2 總體設(shè)計
??? 典型的基于DSP的ISO11783通信系統(tǒng)結(jié)構(gòu)框圖如圖2所示。每個節(jié)點均由物理層接口CAN總線收發(fā)器模塊、DSP控制器模塊、應(yīng)用層模塊組成。總線的每個終端需接抑制信號反射的終端電阻,其阻值應(yīng)與總線介質(zhì)的特性阻抗相匹配,使用雙絞線時一般取Rr=100~200Ω。
????????????????? 
2.1 硬件設(shè)計
主控芯片CPU采用TI公司的TMS320F2812 DSP作為微處理器,它內(nèi)部集成了完全支持CAN2.0B協(xié)議的增強型控制器局域網(wǎng)(eCAN)模塊,有32個郵箱,每個郵箱具有獨立可編程的接收過濾屏蔽,且都可用標準的或擴展的標識符配置為發(fā)送或接收郵箱,支持數(shù)據(jù)幀和遠程幀,對發(fā)送和接收的超時現(xiàn)象可采用一種可編程的中斷操作。所有進行數(shù)據(jù)傳輸和接收濾波的協(xié)議功能都由eCAN控制器執(zhí)行,通過DSP內(nèi)的特殊功能寄存器可配置CAN控制器訪問接收到的數(shù)據(jù)以及傳輸數(shù)據(jù)[5]。因此,TMS320F2812可以完成ISO11783總線協(xié)議的數(shù)據(jù)鏈路層和應(yīng)用層的所有功能。
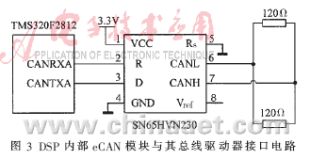
CAN收發(fā)器采用SN65HVN230作為CAN協(xié)議控制器和物理總線之間的接口,與ISO11898標準完全兼容,可提供對總線的差動發(fā)送能力和對控制器的差動接收能力,可編程輸出轉(zhuǎn)換時間,有助于減小電磁干擾,從而提高系統(tǒng)可靠性;同時,還具有可編程斜率控制和休眠功能,可進一步降低系統(tǒng)功耗;SN65HVN230的工作電壓為3.3V,因此無需電平轉(zhuǎn)換即可實現(xiàn)與TMS320F2812的有效連接。具體連接電路如圖3所示。
??????????????????? 
2.2 軟件設(shè)計
通信節(jié)點的主要功能是通過ISO11783實現(xiàn)各ECU之間的相互通信,發(fā)送接收命令、信息、對象池等,實現(xiàn)總線數(shù)據(jù)的共享,從而提高各自的控制性能和運行效率,并對來自總線的干擾進行隔離,保證ECU的可靠工作。ISO11783總線的每個節(jié)點(ECU)都有自己的網(wǎng)絡(luò)地址和名稱相對應(yīng)。地址是ECU在網(wǎng)絡(luò)上發(fā)送或接收數(shù)據(jù)時用來識別自身的信息標識符,同時也可通過其網(wǎng)絡(luò)管理協(xié)議中的地址管理程序?qū)蝹€的源地址和特殊的ECU功能聯(lián)系起來。而名稱則標識了ECU的基本功能。各個節(jié)點連續(xù)監(jiān)視總線上發(fā)出的各種數(shù)據(jù),當所收到的數(shù)據(jù)地址值與自身地址相吻合時,就接收并處理數(shù)據(jù),然后根據(jù)相關(guān)數(shù)據(jù)類型做出回應(yīng)。這樣可以有效避免多個ECU節(jié)點同時傳輸數(shù)據(jù)時所引起的混亂。
基于DSP的ECU節(jié)點通信程序是在TI公司的CCS2000集成化開發(fā)環(huán)境下編寫的,其C編譯器支持標準的ANSI C語言,因此,可以利用高級語言的特性降低編程的難度,提高程序的可維護性和縮短開發(fā)時間。程序主要包括eCAN模塊的初始化、中斷接收處理以及信息發(fā)送等程序。
2.2.1 eCAN模塊初始化
eCAN模塊使用前必須初始化,按照ISO11783物理層標準要求設(shè)置適當?shù)木W(wǎng)絡(luò)位定時參數(shù),其流程圖如圖4所示。首先要設(shè)置主控制寄存器" title="控制寄存器">控制寄存器(CANMC)的改變配置請求位(CCR),當其為1時,eCAN才處于配置模式;然后等待錯誤狀態(tài)寄存器(CANES)的改變配置使能位(CCE)置位" title="置位">置位,當其為1時,初始化操作才能被執(zhí)行;最后就可以對位定時器配置寄存器(CANBTC)的相應(yīng)位進行設(shè)置,以達到所要求的總線傳輸速率。
???????????????????????????????????? ????? 
2.2.2 信息發(fā)送
??? 信息的發(fā)送程序由郵箱配置和發(fā)送信息兩部分組成。CPU把要發(fā)送的數(shù)據(jù)存儲在被配置為發(fā)送郵箱的某個郵箱中。假設(shè)這個郵箱通過設(shè)置對應(yīng)的ME.n位已被使能,那么在將數(shù)據(jù)和標識符寫到RAM以后,且對應(yīng)的TRS.n位已被置位,則郵箱中的信息將被發(fā)送出去;如果同時有多個郵箱被設(shè)置為發(fā)送郵箱和多個相應(yīng)的TRS.n位被置位,則會按照郵箱優(yōu)先級的高低,依次發(fā)送對應(yīng)的消息。如果由于缺少仲裁或錯誤使發(fā)送失敗,則要重新嘗試發(fā)送。在此之前,CAN模塊要檢驗是否有其他的發(fā)送請示,然后以最高的優(yōu)先級發(fā)送原來的消息。其信息發(fā)送流程如圖5所示。
???????????????????????????????????????????? 
2.2.3 中斷接收程序
????通過使用合適的屏蔽,將每一個接收消息的標識符和接收郵箱中的標識符進行比較,如果相等,則將接收到的標識符、控制位和數(shù)據(jù)字節(jié)寫入到相應(yīng)的RAM區(qū)域,同時,將相應(yīng)的接收消息未決位RMP.n置位,并且將產(chǎn)生一個接收中斷(如果已被使能)。然后調(diào)用相應(yīng)的CAN郵箱中斷服務(wù)程序,讀取數(shù)據(jù)并復(fù)位RMP.n;反之,若標識符不相符,則消息不被存儲。如果需要保護郵箱里的數(shù)據(jù)不被新的數(shù)據(jù)覆蓋,則要置位覆蓋保護控制寄存器(CANOPC)的相應(yīng)位,并要有其他郵箱用來存儲“溢出”的消息,否則可能會丟失消息而無任何提示。其信息接收流程如圖6所示。
?????????????????????????????????????????????? ????????????????????????????????????
????????????????????????????????????
3 軟件設(shè)計注意問題
??? eCAN的控制和狀態(tài)寄存器要求以32位方式訪問。在采用高級語言編寫程序時,如果直接對寄存器的位進行操作,編譯器會把訪問變?yōu)?6位的訪問方式" title="訪問方式">訪問方式,但對高16位進行寫操作時,可能會破壞控制寄存器中的內(nèi)容。解決的辦法是:使用1個32位的臨時寄存器,先把欲操作的整個寄存器的內(nèi)容讀入到臨時寄存器中,此操作是32位的訪問方式。在臨時寄存器中對其中的某些位進行操作,然后再把值以32位寫的方式賦給eCAN控制寄存器,以此來強制實現(xiàn)32位訪問方式[6]。實例如下:
??? struct ECAN_REGS ECanaShadow;
??? ECanaShadow.CANMC.all= ECanaRegs.CANMC.all;
??? ECanaShadow.CANMC.bit.CCR=1;????????? //Set CCR=1
??? ECanaRegs.CANMC.all= ECanaShadow.CANMC.all;
此外,在中斷處理過程當中,為了讓CPU內(nèi)核識別并處理CAN中斷,在任何CAN中斷服務(wù)程序(ISR)中必須進行如下操作:
??? (1)必須首先清除寄存器CANGIF0/CANGIF1中引起中斷的標志位。根據(jù)標志類型可通過寫入1或?qū)ο嚓P(guān)寄存器的相應(yīng)位進行寫操作來清除。
??? (2)CAN模塊對應(yīng)的PIEACK位必須寫入1。其C語言實現(xiàn)為:
???????? PieCtrlRegs.PIEACK.bit.ACK9 =1;? //使能PIE
??? (3)必須使能CAN模塊對應(yīng)的中斷線。
??? ????? IER |= 0x0100;???????????????? //使能INT9
??? (4)必須通過清除INTM位來使CPU中斷處于全局使能。其匯編語言實現(xiàn)為:asm('clrc INTM')。
??? 從國內(nèi)外發(fā)展來看,ISO11783通信協(xié)議已成為當前農(nóng)林機械信息化建設(shè)的一個最為重要的標準和依據(jù),而基于此協(xié)議的ECU通信節(jié)點的設(shè)計在整個車輛網(wǎng)絡(luò)的構(gòu)建當中是必不可少的。通過對拖拉機虛擬終端和變速器控制器之間的通信實驗結(jié)果分析表明,本文所提出的設(shè)計方案能夠正常實現(xiàn)符合ISO11783協(xié)議要求的通信功能,并保證了系統(tǒng)運行的穩(wěn)定性和可靠性。
參考文獻
[1] STONE M L, MCKEE K D, FORMWALT C W, et al.?ISO11783: An electronic communications protocol for?agricultural equipment[A]. Agricultural Equipment Technology Conference (Louisville, Kentucky, USA). ASAE?Publication Number 913C1798, 1999.
[2] 程軍,茍凱英.車輛控制系統(tǒng)總線通信和控制協(xié)議SAEJ 1939[J].世界汽車,2000,(2):19-21.
[3]?FELLMETH P. CAN-based tractor-agricultural implement?communication ISO11783 [EB/OL]. 2003-09.
?? ?http://www.can-cia.org/j1939based/iso11783/isobus.pdf.
[4] ISO11783: Tractors and machinery for agriculture and?forestry-serial control and communications data network[S].2004.
[5]?張衛(wèi)寧.TMS320C28x系列DSP的CPU與外設(shè)[M].北京:清華大學出版社,2005:561-613.
[6] TI.Programming examples for the TMS320F281x eCAN[M],2003.