
摘 要: 提出了用于運動補償幀頻提升" title="幀頻提升">幀頻提升的改進三步搜索" title="三步搜索">三步搜索,并描述了算法的系統(tǒng)實現(xiàn)。系統(tǒng)具有高度并行、實時性高等優(yōu)點,經(jīng)過FPGA系統(tǒng)驗證,所處理的圖像主觀質(zhì)量良好,滿足應(yīng)用需要。
關(guān)鍵詞: 運動補償 幀頻提升 三步搜索
隨著數(shù)字電視和多媒體信息技術(shù)的發(fā)展,圖像掃描格式的種類與日俱增,要求現(xiàn)今的圖像顯示系統(tǒng)具備多制式兼容及掃描格式轉(zhuǎn)換能力。為使信號的傳輸頻帶降低,我國現(xiàn)行的電視信號為50Hz隔行PAL制式,有較明顯的視覺缺陷,例如爬行及大面積閃爍。解決上述缺陷的方法就是去隔行,并提高系統(tǒng)的幀頻[1]。簡單的幀復制或幀平均頻率提升方法會導致運動圖像的模糊或抖動,降低圖像的動態(tài)分辨率,嚴重影響視頻圖像序列的主觀質(zhì)量。為了提高圖像的顯示質(zhì)量,采用運動補償?shù)膾呙桀l率轉(zhuǎn)換方法逐漸為人們所青睞,文獻[2~3]給出了兩種實現(xiàn)方法。運動補償頻率提升的核心就是準確、高速的運動矢量計算。為此,本文提出了一種用于高速運動估計" title="運動估計">運動估計的改進三步搜索并用FPGA實現(xiàn)了該運動估計器的硬件原型。
1 運動估計/補償幀頻提升原理
1.1 改進的三步搜索
三步搜索(Three Step Search)具有計算簡單、性能良好等特點,因而在視頻系統(tǒng)中得到了廣泛的應(yīng)用[4]。筆者根據(jù)具體的項目要求,在原有的TSS基礎(chǔ)上做了相應(yīng)的改進,提出了改進的三步搜索。
(1)原有的三步搜索一般都是步長折半搜索,也就是說,如果第一步的步長為4(像素),那么第二步與第三步的步長分別為2和1。對幀頻提升而言,每兩幀之間的時間間隔非常小(約20ms), 說明兩幀之間匹配塊的運動矢量比較小。基于上述假設(shè),將三步搜索中第一步的步長調(diào)整為3,其它兩步的步長保持不變,可以直接計算出新三步搜索的搜索范圍是±6。經(jīng)過上述調(diào)整,運動估計器明顯提升了中心點L4(圖1所示)附近小運動的估計效果,彌補了原三步法因為第一步步長過大而造成的運動估計精度下降。

(2)傳統(tǒng)三步搜索的匹配塊大小為16×16,顯然不適合精細的運動補償線性插補" title="插補">插補。但是,由于真實物體運動的一致性,過小的匹配塊會產(chǎn)生較多不正確的運動矢量[5]。于是,將匹配塊的大小調(diào)整為8×8,以適應(yīng)插補要求。
新三步搜索的過程如圖1所示。每個8×8匹配塊的中心點定為該塊左上角的像素,搜索區(qū)(Searching Area)的大小為20×20(20=8+6+6)。
第1步 搜索t幀搜索區(qū)內(nèi)以L0~L8為中心的匹配塊,用MAD(Mean Absolute Difference)函數(shù)計算塊匹配誤差BME(Block Matching Error),得出與t+1幀內(nèi)當前塊最匹配的塊;
第2步 以第1步搜索得到的最小誤差點為中心,即圖中空心圓代表的位置,步長為2,搜索其周圍的8個頂點,計算以這8個點為中心的匹配塊的BME,得出與當前塊最為匹配的塊;
第3步 同第2步,步長變?yōu)?。
經(jīng)過三步搜索后,運動估計器找到了當前塊在前一幀內(nèi)的匹配塊以及用相對坐標表示的運動矢量,為后續(xù)的線性插補做準備。如圖1所示,當前塊的運動矢量為{5,5}。
1.2 幀頻提升原理簡介
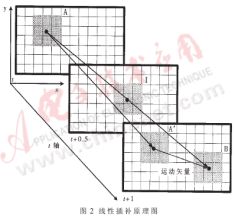
運動估計器計算出當前塊的運動矢量后,將運動矢量除以2,就可得到插值" title="插值">插值幀(t+0.5)內(nèi)與當前塊相對應(yīng)插值塊的位置,或者說相對坐標。如果運動估計足夠準確,則插值幀內(nèi)所有的塊都能找到與它對應(yīng)的當前塊,這樣,可以將插值幀插補出來。將插值幀連同原始幀按順序送顯,可以實現(xiàn)50Hz~100Hz的幀頻提升。插補的原理如圖2所示,其中A代表前一幀內(nèi)與當前塊相匹配的塊,A’代表A在當前幀內(nèi)的映射塊,I代表插補塊,B代表當前塊。以上只是簡要說明插補的原理,在實際應(yīng)用中,幀頻一般不會很高,例如VGA格式的LCD顯示器,其最佳掃描頻率為75Hz。要想將逐行的50Hz數(shù)字電視信號在液晶屏上顯示,只需將幀頻提升到75Hz并調(diào)整分辨率即可。當然,使用的插補方法會與前述的略有不同,由于篇幅所限,本文就不再敷述。
2 運動估計器的硬件實現(xiàn)
標準數(shù)字PAL制式的分辨率為720×576[6],也就是說,每一幀圖像內(nèi)有6480個8×8的像素塊。要想在一幀的間隔內(nèi)(約20ms)將所有像素塊的運動矢量(MV)計算出來,并將插值幀連同原始幀實時送顯,就要求運動估計進行得非常快。為了滿足矢量計算的高速性,本文提出的運動估計器采用了高度并行的處理結(jié)構(gòu)。
2.1 系統(tǒng)結(jié)構(gòu)
該系統(tǒng)主要分為三部分,即存儲子系統(tǒng)、運算子系統(tǒng)以及數(shù)據(jù)組織子系統(tǒng),如圖3所示。
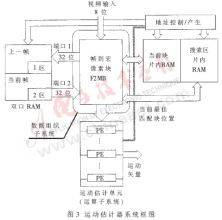
存儲子系統(tǒng)主要由1塊片外雙口RAM和若干塊片內(nèi)RAM組成。片外RAM用于存儲當前幀和上一幀的像素數(shù)據(jù),一個端口用來接收輸入視頻流,另外一個端口用來向片內(nèi)RAM緩沖區(qū)發(fā)送數(shù)據(jù)。片內(nèi)RAM主要用于緩沖當前塊和搜索區(qū)的數(shù)據(jù),采用Xilinx VirtexⅡ2V1500的內(nèi)置RAM充當,在編寫代碼時用RAMB4_S16_S16原語調(diào)用。片內(nèi)RAM又分為當前塊片內(nèi)RAM以及搜索區(qū)(SA)片內(nèi)RAM兩大部分。地址產(chǎn)生及控制單元應(yīng)該位于存儲子系統(tǒng)內(nèi)部,但是考慮到它的重要性,便將其單獨表示。
運算子系統(tǒng)即運動估計單元,主要負責運動矢量的計算。它由三組處理單元(PE)、一組比較單元以及部分控制電路組成。
數(shù)據(jù)組織子系統(tǒng)主要包括幀到宏像素塊轉(zhuǎn)換模塊(Frame To Macro Block)以及一些控制電路,它主要負責輸入視頻的序列緩沖,然后存入片外RAM以及將片外RAM的數(shù)據(jù)緩沖,寫入片內(nèi)RAM。
2.2 片內(nèi)RAM的組織結(jié)構(gòu)
用于存儲當前塊(8×8)的片內(nèi)RAM由4塊32位RAM組成,2塊構(gòu)成1頁,共有2頁。這樣做的目的是為了在讀取第n個當前塊送入運動估計單元進行計算時,還能用另一頁RAM載入第n+1個當前塊的數(shù)據(jù)。這種乒乓存儲結(jié)構(gòu)大大提高了運算速度,實現(xiàn)了時間的復用。圖4表示了1頁RAM的結(jié)構(gòu),其中地址線3根,可以計算出1頁RAM的容量為:![]() ,剛好容納1個當前塊。
,剛好容納1個當前塊。
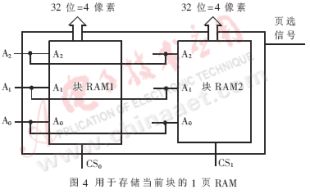
用于存儲搜索區(qū)像素片內(nèi)RAM的組成結(jié)構(gòu)與當前塊片內(nèi)RAM基本相同,不同的是用到的RAM的塊數(shù)為10塊。RAM陣列提供了足夠的數(shù)據(jù)帶寬,使運動估計器能自由尋址搜索區(qū)內(nèi)的一行20個像素數(shù)據(jù)。
2.3 運動估計單元
運動估計單元是整個運動估計器的核心,在文獻[7~8]的基礎(chǔ)上,提出了24個(三組)處理單元同時并行工作的高速結(jié)構(gòu)。如圖5所示,基于這種結(jié)構(gòu),運動估計單元每個時鐘周期能計算出24個差值。
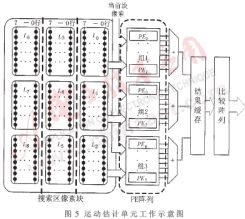
當數(shù)據(jù)組織子系統(tǒng)將當前幀的前8行數(shù)據(jù)存入片外RAM后,運動估計單元開始工作。系統(tǒng)與時鐘的上升沿同步,T表示時鐘周期。圖6給出了運動估計單元的工作時序圖;圖7給出了處理單元PE的硬件結(jié)構(gòu)。
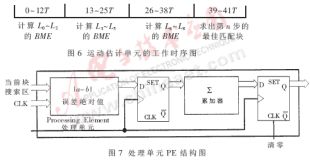
0~7 T 依次讀入匹配塊L0、L1、L2的第0行到第7行,送入并行PE陣列;
8~9 T 每一個PE計算出有效結(jié)果;
10~12 T 樹狀加法器陣列計算出匹配塊L0、L1、L2的匹配誤差BME,并送入結(jié)果緩存。
13~20 T 依次讀入匹配塊L3、L4、L5的第0行到第7行,送入并行PE陣列;
21~22 T 每一個PE計算出有效結(jié)果;
23~25 T 樹狀加法器陣列計算出匹配塊L3、L4、L5的匹配誤差BME,并送入結(jié)果緩存。
26~38 T 運動估計單元計算出匹配塊L6、L7、L8的匹配誤差;
39~41 T 比較陣列得出新三步搜索第一步的最佳匹配塊。
第二步和第三步的情況與第一步類似:第83個時鐘的上升沿比較陣列求得第二步的最佳匹配塊,第125個時鐘的上升沿比較陣列求得最終的最佳匹配塊。
這樣,每經(jīng)過126個時鐘周期,運動估計器找到一個當前塊的最佳匹配塊,并以運動矢量的方式將結(jié)果輸出。取主頻100MHz,處理大小為720×576的一幀圖像所用的時間是![]() =8.1648≈8.2ms<幀間隔20ms的一半,為后續(xù)的插幀過程留下足夠的處理時間。
=8.1648≈8.2ms<幀間隔20ms的一半,為后續(xù)的插幀過程留下足夠的處理時間。
3 實驗結(jié)果
用Verilog硬件描述語言編寫源代碼,綜合采用Xilinx ISE 6.3i;用ModelSim做后仿真,將運動矢量輸出到記錄文件中;用計算機處理輸出的結(jié)果,插補出來的t+0.5幀圖像效果良好。輸入采用football序列,軟硬件的結(jié)果對比如圖8、9所示。
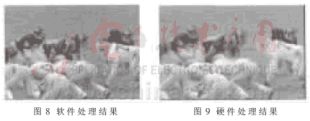
本文提出了一種適用于幀頻提升的三步搜索系統(tǒng)實現(xiàn),并用FPGA對其硬件原型驗證。實驗結(jié)果表明采用高速并行結(jié)構(gòu)的運動估計器具有速度快、精度高等優(yōu)點,滿足幀頻提升系統(tǒng)的要求。
參考文獻
1 C. Hentchel. Linear and nonlinear procedures for flicker reduction. [J]in IEEE Trans. Consumer Electron., 1987;CE-33(8)192~198
2 T. Reuter. Improved TV standards conversion with 3-dimen-sional motion compensating interpolation filter. [J]in Proc.Club de Rennes Young TV Researchers Conf.[C],Cambridge, MA, Oct. 1988
3 D. P. Siohan, B.Choquet.Field-rate conversion by motion estimation/compensation.[J]in Signal Processing of HDTV, L.Chiariglione,Ed.Amsterdam: Elsevier, 1988:319~328
4 H. M. Jong,L. G. Chen,T. D. Chiueh. Performance improvements and cost reductions of the 3-step block-matching algorithm.[J]in IEEE Trans.Circ. and Syst.for Video Technol
5 吳 勇.數(shù)字視頻的時-空處理算法及其VLSI實現(xiàn)[J].西安交通大學博士學位論文,2002;0401
6 Roberto Castagno, Petri Haavisto, G. Ramponi.A method for motion adaptive frame rate up-conversion.[J]in IEEE Trans-actions on Circuits and Systems for Video Technology, Oct 1996;6(5)
7 H. M. Jong,L. G. Chen,T. D. Chiueh. Parallel architecture for 3-step hierarchical search block-matching algorithm. [J]in IEEE Trans. Circ. and Syst. for Video Technol.Aug.1994;4(4)
8 G. Gupta and C. Chakrabatri. Architectures for hierarchical and other block matching algorithms.[J]in IEEE Trans.Circ. and Syst. for Video Technol.Dec. 1995;5(6)