
???? 摘 要: 針對(duì)模糊圖像增強(qiáng)" title="圖像增強(qiáng)">圖像增強(qiáng)算法存在運(yùn)算速度慢以及丟失部分圖像信息等問題,提出一種封閉性和移植性好的廣義模糊增強(qiáng)算子。該算子結(jié)合梯度算子將圖像增強(qiáng)處理集中在敏感區(qū)域,并構(gòu)造四種結(jié)構(gòu)元素求出" title="求出">求出敏感區(qū)域內(nèi)的數(shù)學(xué)形態(tài)學(xué)" title="數(shù)學(xué)形態(tài)學(xué)">數(shù)學(xué)形態(tài)學(xué)梯度來提取圖像邊緣,實(shí)現(xiàn)一種圖像增強(qiáng)與邊緣提取算法。將新算法應(yīng)用于瀝青路面裂縫圖像檢測系統(tǒng)中,實(shí)驗(yàn)結(jié)果表明,該算法的圖像增強(qiáng)和邊緣提取效果優(yōu)于現(xiàn)有的模糊圖像增強(qiáng)算法和傳統(tǒng)邊緣提取算法。
??? 關(guān)鍵詞: 圖像增強(qiáng)? 邊緣提取? 模糊? 數(shù)學(xué)形態(tài)學(xué)? 瀝青路面
?
??? 瀝青路面裂縫圖像檢測過程中,圖像處理算法在很大程度上影響檢測與識(shí)別的效果和精度。其中,通過圖像增強(qiáng)和邊緣提取獲得裂縫特性是關(guān)鍵。模糊集合" title="模糊集合">模糊集合理論已在圖像增強(qiáng)處理領(lǐng)域取得了較好效果[1],經(jīng)典方法主要有Pal算法和Pal改進(jìn)算法[2-4],但其存在缺點(diǎn):算法核心的非線性變換函數(shù)在變換后,其反函數(shù)局部無解,導(dǎo)致圖像部分灰度信息丟失;對(duì)閾值參數(shù)(渡越點(diǎn))的選取需要人工介入;運(yùn)算速度較慢等。經(jīng)典邊緣提取方法主要包括Prewitt算子和Sobel算子等[1],其處理速度快、實(shí)現(xiàn)簡單,但對(duì)裂縫邊緣提取的效果不太理想。針對(duì)上述缺點(diǎn),本文提出一種新的廣義模糊增強(qiáng)算子,以解決圖像部分灰度信息丟失問題,并將其引入圖像增強(qiáng)算法中,結(jié)合梯度算子將增強(qiáng)處理集中在敏感區(qū)域(裂縫邊緣),以提高運(yùn)算速度并采用OTSU算子[5]自適應(yīng)選擇不同的閾值參數(shù)。同時(shí),利用數(shù)學(xué)形態(tài)學(xué)原理構(gòu)造四種結(jié)構(gòu)元素,依次從四個(gè)方向獲得敏感區(qū)域內(nèi)的數(shù)學(xué)形態(tài)學(xué)梯度。最后,利用該梯度提取裂縫的邊緣。實(shí)現(xiàn)證明,能夠很好地獲得瀝青路面裂縫特性。
1 圖像增強(qiáng)算法
1.1 模糊圖像增強(qiáng)原理
??? 模糊圖像增強(qiáng)首先將大小為M×N、灰度級(jí)為L的原圖像f映射為一個(gè)M×N的模糊矩陣:
??? 
式中,μij/fij為圖像f中像素點(diǎn)f(i,j)的灰度fij相對(duì)于某個(gè)特定的灰度級(jí)L′的隸屬度,在經(jīng)典的模糊圖像增強(qiáng)算法[2-3]中,Pal和King選取的隸屬度函數(shù)為:
??? 
??? 通常取Fe=2,F(xiàn)d可由渡越點(diǎn)確定。然后對(duì)圖像進(jìn)行增強(qiáng),采用的非線性變換函數(shù)為:
??? 
??? 最后對(duì)μij′進(jìn)行反模糊化處理,得到經(jīng)過模糊增強(qiáng)后的圖像f′,f′中的像素點(diǎn)f′(i,j)的灰度值fij′為:
???  ??
??
式中,F(xiàn)-1(g)為F(g)的逆運(yùn)算。
??? 由參考文獻(xiàn)[6]可得到如下結(jié)果:(1)經(jīng)過式(3)的Fr(g)變換后,會(huì)出現(xiàn)μij′
1.2.1 廣義模糊增強(qiáng)算子
??? 為克服上述缺陷,根據(jù)廣義模糊集合具有比普通模糊集合更大的拉伸和變換范圍等優(yōu)點(diǎn),本文定義一種新的廣義模糊增強(qiáng)算子,并對(duì)模糊圖像增強(qiáng)算法的核心函數(shù)式(2)~(5)進(jìn)行了如下修改:
??? 
式(8)中,μc是由渡越點(diǎn)fc確定(fc可由OTSU算子自適應(yīng)獲得)。解決渡越點(diǎn)選擇需要人工介入的缺陷,消除了渡越點(diǎn)選擇的隨機(jī)性。則μc的值不一定等于0.5,其公式為:
??? 
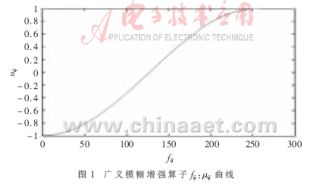
??? Fr(μij)隨著?滋ij的值不同而增大(當(dāng)μij>μc)或減小(當(dāng)μij≤μc)。當(dāng)μij>μc時(shí),非線性變換的結(jié)果使μij′的值向1靠近,從而使得fij′向L-1靠攏;反之,當(dāng)μij≤μc時(shí),非線性變換的結(jié)果使μij′的值向0靠近,從而使得fij′也向0靠攏。廣義模糊增強(qiáng)算子fij:μij變化曲線如圖1所示。
??? 由圖1可知,μij取值范圍為[-1,1],經(jīng)過式(8)非線性增強(qiáng)后,μij′取值范圍也為[-1,1],解決了非線性變換和逆變換后局部無解所造成的圖像部分灰度信息丟失的問題。
?????????????????? 
1.2.2 圖像增強(qiáng)算法步驟
??? 圖像的邊緣信息是梯度突變的區(qū)域,文中定義為敏感區(qū)域。在進(jìn)行圖像增強(qiáng)時(shí),通過梯度算子先確定出敏感區(qū)域的像素點(diǎn),然后再利用廣義模糊增強(qiáng)算子對(duì)敏感區(qū)域的像素點(diǎn)進(jìn)行模糊圖像增強(qiáng)處理,同時(shí)通過OTSU算子自動(dòng)計(jì)算最佳渡越點(diǎn)。由于只是對(duì)敏感區(qū)域的像素點(diǎn)進(jìn)行模糊圖像增強(qiáng)運(yùn)算,從而減少了大量不必要的運(yùn)算,提高了處理速度。相關(guān)的算法步驟如下:
??? (1)采用梯度算子求出圖像敏感區(qū)域的像素點(diǎn)。設(shè)圖像f,像素點(diǎn)f(i,j)的梯度可以表示成一個(gè)矢量,設(shè)Gi、Gj分別表示像素點(diǎn)f(i,j)沿著i方向和j方向的梯度,則這個(gè)梯度矢量可以表示為:
??? 
??? 這個(gè)矢量的幅度可以表示為:
???  ?
?
??? 適當(dāng)選取門限μ,令θ=25。對(duì)于像素點(diǎn)f(i,j),若mag(f)>θ時(shí),則將其標(biāo)記為敏感區(qū)域的像素點(diǎn),記為fs(i,j)。
??? (2)采用OTSU算子求出圖像fs區(qū)域的最佳閾值T。
??? (3)利用文中提出的廣義模糊增強(qiáng)算子對(duì)圖像敏感區(qū)域fs進(jìn)行圖像增強(qiáng)處理。
??? 通過步驟(1)得到的結(jié)果,首先去掉了圖像非邊緣(不屬于fs)的像素點(diǎn),將這些像素點(diǎn)直接標(biāo)記為背景,再由步驟(2)得到最佳閾值T,并結(jié)合式(10)求出廣義模糊增強(qiáng)算子的渡越點(diǎn):
???  ???
???
??? 由式(6)對(duì)圖像敏感區(qū)域fs進(jìn)行模糊化處理,映射為特征平面上的模糊矩陣,然后由式(7)和式(8)進(jìn)行非線性變換,對(duì)特征平面矩陣數(shù)據(jù)進(jìn)行增強(qiáng)處理,最后由式(9)將處理后的矩陣數(shù)據(jù)進(jìn)行反模糊化處理,映射到圖像空域中去。
2 邊緣提取算法
??? 設(shè)圖像f中的像素點(diǎn)的灰度值為f(i,j),b(i,j)是結(jié)構(gòu)元素。用b對(duì)f進(jìn)行灰度腐蝕與膨脹定義為:
??? 
式中,Df和Db分別是f和b的定義域。
??? 對(duì)灰度圖像進(jìn)行膨脹得到結(jié)果與進(jìn)行腐蝕得到的結(jié)果相減其結(jié)果稱為形態(tài)學(xué)梯度,定義為:
???  ????
????
??? 為了更好地提取出不同方向的邊緣,定義四種不同方向的3×3的結(jié)構(gòu)元素,如圖2所示。
??????????????? 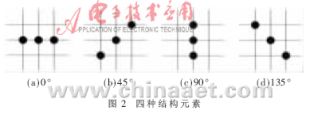
??? 四種結(jié)構(gòu)元素分別為:B1=((-1,0),(0,0),(1,0))、B2=((-1,1),(0,0),(1,-1))、B3=((0,-1),(0,0),(0,1))、B4=((-1,-1),(0,0),(1,1))。
??? 數(shù)學(xué)形態(tài)學(xué)邊緣提取算法為:對(duì)圖像敏感區(qū)域fs像素點(diǎn)fs(i,j)依次從四個(gè)方向進(jìn)行數(shù)學(xué)形態(tài)學(xué)梯度處理,設(shè)A為以fs(i,j)為中心的1×3的區(qū)域集合,可得處理結(jié)果為:
??? 
??? 由式(18)可得圖像的總的梯度結(jié)果集合為C=C1∪C2∪C3∪C4,即:
????
??? 同時(shí)用OTSU算子重新計(jì)算最佳閾值T′來對(duì)C內(nèi)的像素點(diǎn)fs(i,j)進(jìn)行閾值化分割,如下式:
??? 
??? 可得到結(jié)果C′為:
???  ?
?
??? 集合C′即為提取出的邊緣。
3 實(shí)驗(yàn)結(jié)果與分析
??? 在相同的硬件和軟件資源環(huán)境下,實(shí)現(xiàn)上面各種圖像處理算法。實(shí)驗(yàn)的硬件平臺(tái)為P4 2.40GHz處理器和256MB內(nèi)存的工控機(jī),軟件開發(fā)環(huán)境為Visual C++ 6.0。實(shí)驗(yàn)采用256級(jí)瀝青路面裂縫灰度圖像(采集于西安—寶雞高速公路),大小為800×500個(gè)像素,背景光照不均并且含有大量的噪聲。對(duì)如圖3(a)所示的樣本圖像分別采用Pal算法、參考文獻(xiàn)[4]算法以及文中提出的圖像增強(qiáng)算法進(jìn)行增強(qiáng)處理,渡越點(diǎn)通過OTSU算子運(yùn)算統(tǒng)一確定為146,并且各種增強(qiáng)算法僅進(jìn)行一次迭代處理,最后,結(jié)合文中提出的邊緣提取算法對(duì)增強(qiáng)后的圖像進(jìn)行邊緣提取,其結(jié)果如圖3(b)、(c)、(d)所示。
????????????????? 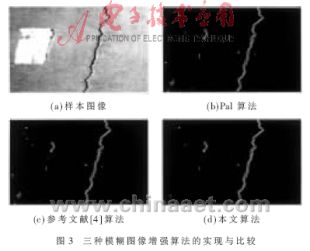
??? 由圖3可以看出,三種" title="三種">三種模糊圖像增強(qiáng)算法對(duì)裂縫邊緣的增強(qiáng)和保護(hù)效果都很好,但因受噪聲的干擾,Pal算法和參考文獻(xiàn)[4]算法在增強(qiáng)裂縫邊緣的同時(shí),對(duì)噪聲也進(jìn)行了增強(qiáng),不能很好地抑制噪聲。而本文提出的圖像增強(qiáng)算法在增強(qiáng)和保護(hù)裂縫邊緣的同時(shí),很好地抑制了噪聲,如表1所示。由此說明本文提出模糊圖像增強(qiáng)算法具有很好的邊緣增強(qiáng)能力和很強(qiáng)的抗噪能力。
?????????????????? 
??? 在程序中利用“time”類的Clock( )函數(shù)來計(jì)算并比較三種模糊圖像增強(qiáng)算法對(duì)樣本圖像進(jìn)行一次迭代圖像增強(qiáng)所需的運(yùn)算時(shí)間,如表2所示。
??????????????????? 
??? 由表2可以看出,本文提出的圖像增強(qiáng)算法對(duì)樣本圖像進(jìn)行增強(qiáng)所需的處理時(shí)間最短。說明了其在保證增強(qiáng)處理的效果的同時(shí),也保證了處理速度。
??? 采用本文提出圖像增強(qiáng)算法對(duì)樣本圖像進(jìn)行增強(qiáng)處理,再分別采用Sobel算子和Prewitt算子進(jìn)行邊緣提取,其效果如圖4所示。
????????????????????? 
??? 對(duì)比圖3(d)和圖4,可以看出,Sobel算子和Prewitt算子提取出的裂縫邊緣有斷裂現(xiàn)象和大量的噪聲,并且將路面中的標(biāo)志線也提取出來,不利于后期對(duì)裂縫進(jìn)行分析;而本文提出的邊緣提取算法能很好地抑制噪聲,較好地提取出裂縫邊緣和保護(hù)裂縫邊緣的完整性,并且提取的裂縫邊緣光滑,極大地方便后期對(duì)裂縫進(jìn)行分析。同時(shí),利用“time”類的Clock( )函數(shù)來計(jì)算并比較三種邊緣提取算法,對(duì)樣本圖像進(jìn)行邊緣提取所需的處理時(shí)間如表3所示。
??????????????????? 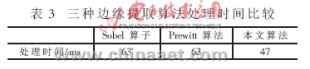
??? 由表3可以看出,本文提出的邊緣提取算法對(duì)樣本圖像進(jìn)行邊緣提取所需的處理時(shí)間最短,說明其在保證邊緣提取的效果的同時(shí),也保證了處理速度。
??? 本文提出的廣義模糊增強(qiáng)算子,解決了模糊增強(qiáng)算法在非線性變換后圖像部分灰度信息丟失的缺陷,并將圖像增強(qiáng)處理集中在敏感區(qū)域,大大提高了處理速度,同時(shí),通過程序自動(dòng)計(jì)算出最佳閾值參數(shù),克服了閾值參數(shù)選擇的盲目性,具有一定的自適應(yīng)性。最后,結(jié)合數(shù)學(xué)形態(tài)學(xué)邊緣提取算法對(duì)圖像進(jìn)行邊緣提取,應(yīng)用于瀝青路面裂縫圖像檢測系統(tǒng)中。實(shí)驗(yàn)結(jié)果表明,文中提出的圖像增強(qiáng)和邊緣提取算法能夠很好地增強(qiáng)裂縫邊緣信息和保護(hù)裂縫邊緣的完整性,并且具有很好的抗噪能力和實(shí)時(shí)性,有一定的實(shí)用性和推廣性。
參考文獻(xiàn)
[1] PRATT W K.Digital image processing(2nd edition)[M].New York,USA:Wiley Interscience,1991:188-198.
[2] PAL S K,KING R A.Image enhancement using fuzzy sets[J].Electron.Lett.,1980,16(9):376-378.
[3] PAL S K,KING R A.Image enhancement using smoothing?with fuzzy sets[J].IEEE Trans.Syst.Man.Cybern.,1981,11(7):494-501.
[4] 李弼程,郭志剛,文超.圖像的多層次模糊增強(qiáng)與邊緣提取[J].模糊系統(tǒng)與數(shù)學(xué),2000,14(4):77-83.
[5] 李晉惠.用圖像處理的方法檢測公路路面裂縫類病害[J].長安大學(xué)學(xué)報(bào)(自然科學(xué)版),2004,24(3):24-29.
[6] 王保平,劉升虎,范九倫,等.基于模糊熵的自適應(yīng)圖像多層次模糊增強(qiáng)算法[J].電子學(xué)報(bào),2005,33(4):730-734.