
摘要:Infineon公司的大功率H半橋集成芯片BTN7970內(nèi)部集成了驅(qū)動電路,故可以直接和MCU接口,同時具有電流檢測,以及過溫、過壓、欠壓、過流和短路保護(hù)等診斷功能。本文介紹了BTN7970在直流電機(jī)控制驅(qū)動系統(tǒng)中的典型應(yīng)用,給出了電機(jī)控制驅(qū)動電路以及軟件設(shè)計(jì)。
關(guān)鍵詞:BTN7970;H橋;PWM控制;直流電機(jī)驅(qū)動
引言
微電機(jī)在嵌入式系統(tǒng)領(lǐng)域的應(yīng)用日益廣泛,采用驅(qū)動電路和MOSFET管的傳統(tǒng)設(shè)計(jì)方法不僅電路設(shè)計(jì)復(fù)雜,而且不容易控制。針對此問題,各半導(dǎo)體廠商推出了直流電機(jī)控制專用集成電路,無需驅(qū)動便可以與MCU接口,且無需另外添加電機(jī)電流檢測電路,外圍器件少,電機(jī)控制簡單。
目前該類芯片已經(jīng)廣泛應(yīng)用于微電機(jī)的嵌入式應(yīng)用領(lǐng)域,但它也存在一些缺點(diǎn);輸出功率有限,不適合大功率直流電機(jī)驅(qū)動的需求;采用PWM信號驅(qū)動且PWM信號的頻率和占空比有一定限制;沒有光電隔離電路,當(dāng)驅(qū)動電路發(fā)生擊穿等故障時會損壞與之相連的MCU等器件。
以Infineon公司推出的BTN7970芯片為例,它所供電壓為8~45 V,最大電流為50 A,驅(qū)動信號PWM頻率為1~25 kHz。由于功率和驅(qū)動信號占空比的限制,使得它有很大的局限性。在電機(jī)控制驅(qū)動電路和控制程序設(shè)計(jì)方面要綜合考慮并采取適當(dāng)措施。本文將詳細(xì)介紹BTN7970在大功率微電機(jī)控制驅(qū)動系統(tǒng)中的典型應(yīng)用。
1 BTN7970簡介
BTN7970是由Infineon(英飛凌)公司推出的智能功率驅(qū)動芯片,內(nèi)含電流檢測電路、控制驅(qū)動電路,以及1個P型和1個N型MOSFET管,可以靈活應(yīng)用于2相或3相、直流有刷或無刷電機(jī)的控制驅(qū)動電路中,不僅可以簡化電路設(shè)計(jì),而且使得控制更加簡單。在過溫、過壓、欠壓、過流和短路的情況下,芯片自動關(guān)斷輸入;當(dāng)電流超過標(biāo)定的最大電流時,通過MCU端的I/0使能引腳關(guān)斷驅(qū)動芯片。為了防止系統(tǒng)在工作過程中因?yàn)樾酒Wo(hù)而停止工作,在系統(tǒng)設(shè)計(jì)時要考慮散熱、穩(wěn)壓、過流保護(hù)等情況并采取措施。
BTN7970提供PG-T0263-7-1、PG-T0220-7-11和PG-T0220-7-12三種封裝。其引腳功能定義如表1所列。
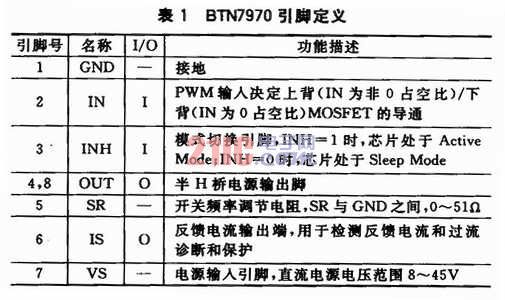
當(dāng)INH引腳輸入高電平時,OUT端輸出電壓由IN端輸入的PWM占空比決定。當(dāng)占空比大于某個值時,輸入芯片內(nèi)部經(jīng)過非門驅(qū)動電路后,輸出低電平使得上背P型MOSFET管導(dǎo)通,此時通過調(diào)節(jié)輸入占空比后調(diào)節(jié)0UT端的輸出電壓。當(dāng)輸入占空比為O時,輸入低電平經(jīng)過非門驅(qū)動電路后,輸出高電平使得下背N型MOSFET管導(dǎo)通,IS端檢測的電流為經(jīng)過上背MOSFET管的電流(即電機(jī)當(dāng)前電流)。在實(shí)際應(yīng)用中通常將2片或3片BTN7970組合起來構(gòu)成電機(jī)控制驅(qū)動電路。
2 電機(jī)控制驅(qū)動電路設(shè)計(jì)
主控制器選用Freescale公司基于PowerPC構(gòu)架的32位處理器MPC5604P。通過I/0口、PWM輸出引腳、A/D采集引腳直接和BTN7970接口。下面介紹2相直流電機(jī)控制驅(qū)動電路的設(shè)計(jì)方法。

采用2片BTN7970組成一個完整的H橋驅(qū)動電路驅(qū)動l路有刷直流電機(jī),如圖1所示。其中,0UT端分別接電機(jī)的兩端;IS端接下拉電阻,用于配置IS端輸出電壓的范圍;MOTOR_PWM_A與MOTOR_PWM_B,分別輸出非零占空比的PWM和零占空比的PWM,保證左右半橋上下背各有一個導(dǎo)通,組成一個回路;通過MOTORCURRENT端間接采集并計(jì)算得到的電流,為通過左或右半橋上背P溝道MOSFET管的電流;SR引腳通過下拉電阻接地,用于調(diào)節(jié)MOSFET管開關(guān)頻率,這里接5.1 kΩ電阻,BTN7970的開/關(guān)時間分別為4.4/3.4μs。另外,由于BTN7970內(nèi)部沒有光電隔離,故在與MCU接口時串聯(lián)10 kΩ電阻,防止驅(qū)動電路發(fā)生擊穿等故障時損壞與其相連接的MCU等器件。

2片BTN7970組成的H橋和MPC5604P之間的接口如圖2所示。對應(yīng)的引腳通過4個網(wǎng)絡(luò)變量連接。將MPC5604P的55引腳直接配置為I/0輸出,接H橋的INH引腳,控制BTN7970的運(yùn)行模式。當(dāng)INH為低電平時,BTN7970處于Sleep模式,但此時芯片仍處于工作狀態(tài),故其供電應(yīng)該由MPC5604P通過I/0引腳控制大電流繼電器來控制。MPC5604P的53和54引腳配置為FlexPWM0模塊,PWMA、PWMB輸出分別接左、右半橋的IN引腳。42引腳配置為A/D輸入接左、右半橋的IS引腳,通過采集IS端電壓可間接計(jì)算出通過電機(jī)的電流:
![]()
式中,VIS和RIS分別為IS端的電壓和電阻值。這里,RIS為470 Ω。
3 電機(jī)控制驅(qū)動程序設(shè)計(jì)
本設(shè)計(jì)使用了MPC5604P的4個信號引腳,開發(fā)和編譯環(huán)境為Code Warrior for MPC55xx V2.3,調(diào)試下載工具為USB Power PC Nexus Multilink調(diào)試器。
3.1 MOTOR_CON控制引腳的初始化
通過配置SIU.PCR[43]寄存器將MPC5604P的55引腳配置為I/O輸出引腳,即SIU.PCR[43].R=0x0202。通過賦值操作SIU.GPDO[43].R=O/1,即可讓該引腳輸出高/低電平。
3.2 MOTOR_PWM_A/B的PWM初始化
首先,通過配置PSMI寄存器將flexpwm0 A[O]、B[0]分配到53、54引腳,配置如下:
SIU.PSMI[20].B.PADSEL=1;
SIU.PSMI[24].B.PADSEL=1;
然后,通過SIU.PCR寄存器的配置將53、54多功能引腳配置為PWM輸出,配置如下:
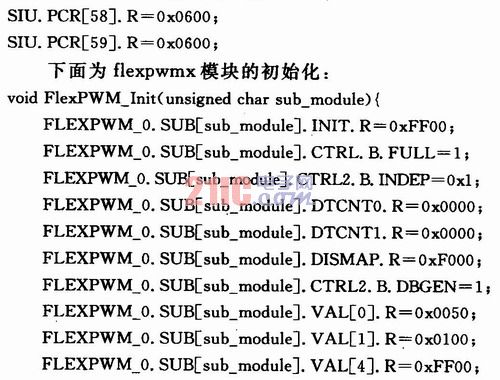
通過調(diào)用函數(shù)FlexPWM_Init(O)即可將本設(shè)計(jì)中使用的flexpwm0模塊初始化。接下來使能PWMA/B輸出配置如下:

在控制程序中通過調(diào)用輸出函數(shù)來配置數(shù)據(jù)重載、PWM輸出和BTN7970使能,即可按設(shè)定的方向和占空比驅(qū)動電機(jī)。
3.3 A/D初始化
首先,通過SIU.PCR[29].R=0x2400操作將PIN42引腳配置為A/D輸入引腳,通過采集IS端電壓間接計(jì)算出通過電機(jī)的電流。本設(shè)計(jì)中使用了MPC5604P片內(nèi)ADCl模塊的AN[O]通道,初始化配置如下:

在本設(shè)計(jì)中通過ADCl的1路硬件監(jiān)控電路對每次A/D采集的值和預(yù)先設(shè)置的值進(jìn)行比較。當(dāng)采集的值超出通過ADC_1.THRHLR0.R設(shè)定的上下限時,將產(chǎn)生中斷。通過中斷服務(wù)程序?qū)OTOR_CON輸出低電平使驅(qū)動IC進(jìn)入Sleep模式,即可實(shí)現(xiàn)過流保護(hù)。初始化和中斷服務(wù)函數(shù)注冊如下:

在SIR服務(wù)函數(shù)中,通過SIU.GPD0[43].R=O;即可關(guān)閉驅(qū)動芯片。接下來發(fā)送A/D通道轉(zhuǎn)換命令并查詢狀態(tài)標(biāo)志位,轉(zhuǎn)換完畢后即可通過讀取.ADC_1.CDR[O].B.CDATA寄存器得到采集的IS端電壓值,并通過計(jì)算公式IL=19 500×VIS/470 Ω計(jì)算得到通過電機(jī)的電流,從而實(shí)現(xiàn)電機(jī)的閉環(huán)控制。
結(jié)語
本文介紹了基于BTN7970的2相直流電機(jī)驅(qū)動電路典型設(shè)計(jì)。該設(shè)計(jì)外圍電路少,無需外加控制信號驅(qū)動電路和電機(jī)電流檢測電路,可直接和MCU接口,并可通過IS引腳輸入電壓計(jì)算直接得到通過電機(jī)的電流。