
摘 要: 提出一種針對超光譜圖像壓縮" title="圖像壓縮">圖像壓縮的基于小波" title="小波">小波變換的、嵌入式的3維塊分割編碼算法。通過3維小波變換" title="小波變換">小波變換,將超光譜圖像的空間冗余和譜間冗余同時去除。針對變換域內(nèi)的小波系數(shù),將集合分割嵌入式塊SPECK編碼算法擴(kuò)展為3維,構(gòu)造一種3維SPECK編碼算法,對小波系數(shù)進(jìn)行量化編碼。實(shí)驗(yàn)證明,3維SPECK編碼算法具有良好的率失真性能,其壓縮效果優(yōu)于采用SPECK方法對每一波段圖像做壓縮編碼" title="壓縮編碼">壓縮編碼的效果,并具有計算復(fù)雜度低和嵌入式的特性。
關(guān)鍵詞: 超光譜圖像壓縮 3維小波變換 3維SPECK(Set Partitioned Embedded bloCK)算法
隨著空間遙感技術(shù)的發(fā)展,超光譜成像技術(shù)在資源勘測、環(huán)境調(diào)查、災(zāi)害預(yù)報、軍事偵察等領(lǐng)域得到越來越廣泛的應(yīng)用。并且,隨著光譜層析技術(shù)與電子技術(shù)的不斷成熟,成像光譜儀的空間分辨率越來越高,波段數(shù)越來越多,產(chǎn)生的數(shù)據(jù)量也越來越大,給存儲和傳輸帶來了很多困難。因此,必須對超光譜遙感圖像進(jìn)行有效的壓縮,以滿足衛(wèi)星遙感平臺的應(yīng)用需要。
從其成像原理看,超光譜圖像像素之間存在兩種相關(guān)性:同一波段內(nèi)像素之間的空間相關(guān)性和不同波段像素之間的譜間相關(guān)性。同時,與自然圖像相比,超光譜圖像含有豐富的紋理信息,空間相關(guān)性較差,而譜間相關(guān)性很強(qiáng)。在對超光譜圖像進(jìn)行壓縮時,要有效地去除這兩種相關(guān)性。
近年來,小波變換方法在圖像壓縮領(lǐng)域得到了廣泛的應(yīng)用。小波變換具有空間——頻率域內(nèi)的局部化特性,能對圖像進(jìn)行多分辨率分解,較好地去除像素間的相關(guān)性,同時保持圖像在各個分辨率下的精細(xì)結(jié)構(gòu),有利于圖像的壓縮編碼。目前,出現(xiàn)了很多基于小波變換的圖像壓縮算法,比較有代表性的有Shapiro[1]提出的EZW算法、Said和Pearlman[2]提出的SPIHT算法、Islam等提出的SPECK算法以及Taubman[4]提出的被采納為JPEG2000標(biāo)準(zhǔn)核心壓縮算法的EBCOT算法。很多學(xué)者將這些算法應(yīng)用到超光譜圖像壓縮中,并針對超光譜圖像的特點(diǎn),研究了適合超光譜圖像壓縮的方法,例如Dragotti等[5]使用K L變換去除光譜維的譜間相關(guān)性,使用2D DWT去除空間相關(guān)性,隨后用一種3維SPIHT算法對變換系數(shù)進(jìn)行量化編碼。另外,WANG Qi等[6]使用1+2維小波變換去除超光譜圖像的空間相關(guān)性和譜間相關(guān)性,對每一波段圖像的小波系數(shù)采用EBCOT方法進(jìn)行壓縮編碼。
本文在這些研究成果的基礎(chǔ)上,提出一種基于小波變換的3維SPECK編碼算法。該算法首先對超光譜圖像序列進(jìn)行3維小波變換,同時去除空間相關(guān)性和譜間相關(guān)性,然后將SPECK算法擴(kuò)展到3維,構(gòu)造一種3維SPECK算法對小波系數(shù)進(jìn)行壓縮編碼。實(shí)驗(yàn)證明,3D SPECK算法具有良好的率失真性能,其壓縮效果遠(yuǎn)遠(yuǎn)優(yōu)于采用SPECK方法對每一波段圖像小波系數(shù)做壓縮編碼的效果。同時,與3維SPIHT算法[5]相比較,此算法具有更低的運(yùn)算復(fù)雜度,并具有嵌入式的特性,能夠滿足不同壓縮應(yīng)用。
1 SPECK編碼算法
圖像經(jīng)過小波變換后,低頻子帶上集中了大部分的重要性小波系數(shù),而各個高頻子帶上分散著大部分的不重要小波系數(shù)。在漸進(jìn)傳輸?shù)那度胧綀D像壓縮系統(tǒng)中,重要性系數(shù)要優(yōu)先進(jìn)行編碼傳輸,以便解碼時首先得到圖像的概貌部分,然后對不重要系數(shù)進(jìn)行編碼傳輸,進(jìn)而得到圖像的細(xì)節(jié)部分。在EZW和SPIHT算法中,主要利用零樹結(jié)構(gòu)來對這些不重要系數(shù)進(jìn)行編碼,雖然利用了子帶之間不重要系數(shù)的相關(guān)性,但沒有充分利用同一子帶中不重要系數(shù)的相關(guān)性,而SPECK算法將子帶中的小波系數(shù)組織成矩形的塊,對系數(shù)塊進(jìn)行分割排序,充分利用了同一子帶中系數(shù)的相關(guān)性。
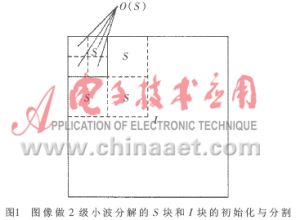
SPECK算法中,程序處理的基本單元是系數(shù)塊,塊分為兩種類型: S類型的塊和I類型的塊。算法初始時,將圖像的所有小波系數(shù)分割為一個 S塊和一個I塊, S塊包含最低頻子帶的系數(shù),I塊包含除去 S塊中系數(shù)以后剩余的系數(shù)。定義一個判決塊重要與否的符號函數(shù)Sn為:

若Sn(S)=1或Sn(I)=1,則認(rèn)為S塊或I塊是重要的,并對重要的S塊或I塊進(jìn)行分割,分割為更小的子塊" title="子塊">子塊,S塊和I塊的分割如圖1所示。
算法中,還用到兩個存儲系數(shù)塊的列表:LIS和LSP。LIS為不重要集合表,存放當(dāng)前閾值下不重要的系數(shù)塊,以便在下一閾值對這些塊進(jìn)行處理,LIS初始化為初始S塊中的系數(shù);LSP是重要系數(shù)表,存放重要的且只包含一個系數(shù)的系數(shù)塊,以便對這些系數(shù)做精細(xì)量化,LSP初始化為空表。
編碼過程中,算法在不同的閾值下對S塊和I塊分別進(jìn)行處理,確定重要性小波系數(shù),對重要的小波系數(shù)優(yōu)先進(jìn)行量化編碼。針對S塊和I塊,算法的處理過程分別為:對S塊,如果S塊是不重要的,將S塊放入LIS中;如果S塊是重要的,采用四叉樹分割方法,將S塊分割為4個大小相等(或近似相等)的子塊,對每一子塊重復(fù)相同的過程,直到找到重要性系數(shù),將重要性系數(shù)放入LSP中以待精細(xì)量化。對I塊,如果I塊是不重要的,將I塊保留,在下一閾值對I塊做重新處理;如果I塊是重要的,按照分割策略,將I塊分割為3個S塊和1個較小的I塊,并對分割得到的S塊和I塊分別做相應(yīng)的處理。
2 超光譜圖像的3維SPECK編碼
超光譜圖像是利用光譜儀對同一地物目標(biāo)在多個離散光譜波段上成像的結(jié)果,因此在2維空間信息的基礎(chǔ)上增加了1維光譜信息,而像素之間的相關(guān)性除了同一波段內(nèi)的空間相關(guān)性以外,還增加了不同波段之間的譜間相關(guān)性。在對超光譜圖像做小波變換時,應(yīng)在空間維和光譜維分別做小波變換,即采用3維小波變換,同時去除像素數(shù)據(jù)間的空間相關(guān)性和譜間相關(guān)性。
為了分析和計算的方便,小波變換通常采用可分離的方式。本文在對超光譜圖像做3維小波變換時,采用可分離的金字塔分解方式,在圖像的行、列、光譜方向分別做1維小波變換,并且只對低頻子帶做小波分解,使圖像能量集中在最低頻子帶的小波系數(shù)上。在對圖像做小波變換時,小波基的選取會對變換后的壓縮產(chǎn)生很大的影響。好的小波基能最大限度地去除圖像的相關(guān)性,同時能較好地保持圖像的紋理、避免較大的邊界失真,利于圖像的編碼和重構(gòu)。文獻(xiàn)[7]證明,由B樣條小波基構(gòu)成的9/7雙正交小波具有良好的正則性和緊支性,并具有線性相位的特點(diǎn),濾波器長度適中,變換后對圖像的影響不大,最利于壓縮應(yīng)用。因此,本文在對超光譜圖像做3維小波變換時,即采用9/7雙正交小波濾波器。
超光譜圖像經(jīng)過3維小波變換后,重要性小波系數(shù)大部分集中到最低頻子帶的3維系數(shù)塊中,而不重要系數(shù)分散到各個高頻子帶的3維系數(shù)塊中。在用SPECK算法對系數(shù)進(jìn)行編碼時,程序處理的系數(shù)塊將是3維的。相應(yīng)地,算法也將擴(kuò)展到3維,構(gòu)造出一種3維SPECK算法,對這些系數(shù)塊進(jìn)行分割排序。在3維SPECK算法中,小波系數(shù)用坐標(biāo)(x,y,z)標(biāo)識,x表示系數(shù)在水平方向的位置,y表示系數(shù)在垂直方向的位置,z表示系數(shù)在光譜方向的位置,系數(shù)的值用C(x,y,z)表示。系數(shù)塊分為兩種類型:S類型塊和I類型塊。初始時,將所有小波系數(shù)分割為一個3維的S塊和一個3維的I塊。S塊包含最低頻子帶的系數(shù),例如經(jīng)過2級小波分解后對應(yīng)于LLL2子帶中的系數(shù)。I塊則包含除去S塊系數(shù)以后剩余的系數(shù),例如經(jīng)過2級小波分解后對應(yīng)于HLL2、LHL2、HHL2、LLH2、HLH2、LHH2、HHH2、HLL1、LHL1、HHL1、LLH1、
HLH1、LHH1、HHH1子帶中的系數(shù)。算法對3維S塊和3維I塊的分割處理如圖2所示。
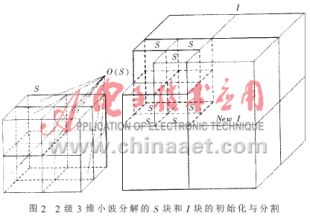
對3維S塊的處理過程:對重要的S塊,將其分割為8個大小相等(或近似相等)的子塊,對每一個子塊,測試其重要性,對重要的子塊進(jìn)行再次分割,直至定位到重要性系數(shù),將重要性系數(shù)放入LSP中;對不重要的S塊,放入LIS中,在下一閾值重新處理。在分割過程中,如果S塊的第3維即光譜維的大小為1時,則S塊只在空間維進(jìn)行分割,分割為4個大小相等的子塊。對3維I塊的處理過程:對重要的I塊,將其分割為7個S塊(如圖2示)和一個較小的I塊,每個S塊包含相應(yīng)尺度下一個子帶的系數(shù),對分割后得到的S塊和I塊分別做相應(yīng)的分割處理;對不重要的I塊,將其保留,不做分割,在下一閾值重新處理。算法詳細(xì)描述如下:
第一步:初始化
·將小波系數(shù)分割為S塊和I塊,S={(x,y,z)|(x,y,z)∈Root},Root為最低頻子帶系數(shù)集合,I塊包含除去S塊中系數(shù)后的剩余系數(shù);
·閾值:
·不重要集合表:LIS={S};重要性系數(shù)表:LSP={};
第二步:分割排序過程
·按塊從小到大的順序,對每一個S∈LIS,執(zhí)行processS(S),對S塊進(jìn)行分割;
·執(zhí)行processI(),對I塊進(jìn)行分割;
processS(S)
{
輸出Sn(S);
if Sn(S)=1
——if S是單個系數(shù),輸出S的符號并將S放入LSP中;
——else執(zhí)行codeS(S);
——if S∈LIS,將S從LIS中刪除;
else
——if S∈LIS,將S放入LIS中;
}
codeS(S)
{
將S分割為8個大小相等(或近似相等)的子塊O(S),如果S塊的第3維即光譜維的大小為1,則S塊只在空間維進(jìn)行分割,分割為4個大小相等的子塊;
對每一個子塊O(S)
——輸出Sn(O(S));
——if Sn(O(S))=1
——if O(S)是單個系數(shù),輸出O(S)的符號并將O(S)放入LSP中;
——else執(zhí)行codeS(O(S));
——else
——將O(S)放入LIS中;
}
processI()
{
輸出Sn(I);
if Sn(I)=1
——執(zhí)行codeI();
}
codeI()
{
將I分割為7個S塊和1個較小的I塊(如圖2示);
對每一個S塊,執(zhí)行processS(S);
對I塊,執(zhí)行processI();
}
第三步:精細(xì)量化過程
·對每一個(x,y,z)∈LSP,除了最后一次排序過程放入的系數(shù)外,輸出|C(x,y,z)|的第n個最重要位;
第四步:閾值更新
·n=n-1;轉(zhuǎn)移到第二步;
3 仿真實(shí)驗(yàn)結(jié)果
本文采用224波段AVIRIS超光譜成像儀拍攝的山地圖像來驗(yàn)證提出的基于3維SPECK編碼的超光譜圖像壓縮算法。每一波段圖像為256×256的灰度圖,每個像素數(shù)據(jù)8bit,選擇172~187波段作為驗(yàn)證算法的實(shí)驗(yàn)數(shù)據(jù)。
對此16個波段的圖像序列,采用由B樣條小波基構(gòu)成的9/7雙正交小波濾波器,做4級3維小波變換,將圖像序列分解為29個子帶的小波系數(shù)。對這些子帶的小波系數(shù)塊,用本文提出的3維SPECK算法進(jìn)行壓縮編碼。
為了客觀評價圖像壓縮的質(zhì)量,本文采用兩個失真評價準(zhǔn)則:平均均方誤差MSE和平均峰值信噪比PSNR,定義為:
式中,f(x,y,z)為原始圖像序列的灰度函數(shù), (x,y,z)為解碼圖像的灰度函數(shù)。
(x,y,z)為解碼圖像的灰度函數(shù)。
為了與零樹編碼方法做壓縮性能比較,本文除了采用3維SPECK算法對小波系數(shù)編碼外,還采用3維SPIHT算法對小波系數(shù)做壓縮編碼。同時,還使用2維SPECK編碼算法對每一波段圖像的小波系數(shù)做壓縮編碼,與3維SPECK算法的壓縮結(jié)果做比較。壓縮結(jié)果如表1所示。

從實(shí)驗(yàn)結(jié)果可以看出:對整體圖像序列采用3維SPECK方法的壓縮效果要遠(yuǎn)遠(yuǎn)優(yōu)于對每一波段圖像采用2維SPECK方法的壓縮效果。這主要是因?yàn)槌庾V圖(接上頁)
像的空間相關(guān)性較差,圖像的紋理細(xì)節(jié)非常豐富,而不同波段圖像的紋理和邊緣非常近似,圖像之間存在紋理結(jié)構(gòu)上的相關(guān)性,3維SPECK方法很好地利用了這種結(jié)構(gòu)相關(guān)性,因此取得了較2維SPECK方法更好的壓縮性能。
另外,為了與基于小波零樹的編碼方法做性能比較,本文采用了3維SPIHT方法對小波系數(shù)進(jìn)行編碼。從實(shí)驗(yàn)結(jié)果可以看出,在相同碼率下,此算法的峰值信噪比較3維SPIHT方法有很微小的降低。然而,SPECK方法處理的是小波系數(shù)塊,不需要像SPIHT方法那樣在整個小波系數(shù)域內(nèi)搜索零樹,因此,計算復(fù)雜性和資源需求比SPIHT方法低。這一點(diǎn)對衛(wèi)星遙感平臺的應(yīng)用很重要。
參考文獻(xiàn)
1 J.M.Shapiro. Embedded image coding using zerotrees of wavelets coefficients[J].IEEE Trans.Signal Processing,1993;41(12):3450~3462
2 A.Said,W.A.Pearlman. A new fast and efficient image codec based on set partitioning in hierarchical trees[J].IEEE Trans.Circuits and Systems for Video Technology,1996;6(6):243~250
3 A.Islam,W.A.Pearlman.An embedded and efficient low-complexity hierarchical image coder[C].San Jose:SPIE Opt Soc,1999:294~305
4 D.Taubman.High performance scalable image compression with EBCOT[J].IEEE Trans.Image Processing,2000;9(7):1158~1170
5 P.L.Dragotti,G. Poggi,A.R.P.Ragozini.Compression of mult-ispectral images by three-dimensional SPIHT algorithm[J].IEEE Trans.Geoscience and Remote Sensing,2000;38(1):416~427
6 王 琪,郭 雷. 基于1+2維小波變換的多光譜圖像壓縮[J].光子學(xué)報,2003;32(9):1126~1129
7 ANTONINI M,BARLAUD M,MATHIEU P .Image coding using wavelet transform[J].IEEE Trans.Image Processing,1992;1(2):205~220