
0引言
結(jié)冰傳感器是用于探測(cè)結(jié)冰厚度的設(shè)備。它是基于振動(dòng)原理設(shè)計(jì)的,振動(dòng)體采用振管形式。當(dāng)振管垂直立于環(huán)境中時(shí),激振電路為振管提供交變磁場(chǎng),振管在磁場(chǎng)的作用下產(chǎn)生磁致伸縮作軸向振動(dòng),同時(shí)信號(hào)拾取電路將此機(jī)械振動(dòng)信號(hào)轉(zhuǎn)變?yōu)殡娦盘?hào)反饋給激振電路,使電路諧振于振管的軸向振動(dòng)固有頻率上。根據(jù)振動(dòng)理論,當(dāng)振管表面出現(xiàn)冰層時(shí),其軸向振動(dòng)固有頻率會(huì)產(chǎn)生偏移,使電路的諧振頻率也產(chǎn)生偏移,因此根據(jù)頻率偏移量即可確定冰層的厚度。
d=F(f′-f0) (1)
式中:d為冰層厚度;
f′為結(jié)冰后的振動(dòng)頻率;
f0為結(jié)冰前的振動(dòng)頻率。
f0為定值,所以冰層厚度只與頻率值f′有關(guān)系,但頻率值與冰層厚度為非線性關(guān)系,不能簡(jiǎn)單地由頻率值確定所測(cè)的冰層厚度,這樣增加了厚度顯示和處理的復(fù)雜性。為了保證一定的測(cè)量精度以便于在測(cè)控系統(tǒng)中應(yīng)用,必須對(duì)其進(jìn)行非線性校正。
以前一直采用表格法進(jìn)行數(shù)據(jù)處理,通過分段線性化法來逼近傳感器的靜態(tài)特性曲線,簡(jiǎn)單、實(shí)用。但當(dāng)表格小時(shí),精度受到影響;表格大時(shí),實(shí)時(shí)性受影響,對(duì)傳感器的處理器提出了嚴(yán)格的要求。
神經(jīng)網(wǎng)絡(luò)方法為傳感器的非線性校正方法的研究開辟了新的途徑。具體做法是,以實(shí)驗(yàn)數(shù)據(jù) 為樣本訓(xùn)練BP網(wǎng)絡(luò),得到結(jié)冰傳感器的逆模型,從而使傳感器經(jīng)神經(jīng)網(wǎng)絡(luò)組成的系統(tǒng)線性化,傳感器的非線性特性得到補(bǔ)償,校正后的網(wǎng)絡(luò)可按線性特性處理,提高了測(cè)量精度,大大拓展了結(jié)冰傳感器的應(yīng)用范圍。
1BP網(wǎng)絡(luò)
人工神經(jīng)網(wǎng)絡(luò)是一門新興交叉學(xué)科。在人工神經(jīng)網(wǎng)絡(luò)的實(shí)際應(yīng)用中,80%~90 %的人工神經(jīng)網(wǎng)絡(luò)模型是采用BP神經(jīng)網(wǎng)絡(luò)。它是一種前饋神經(jīng)網(wǎng)絡(luò),通常由輸入層、輸出層和若干隱含層組成,相鄰層之間通過突觸權(quán)矩陣連接起來。研究最多的是一個(gè)隱含層的網(wǎng)絡(luò),因?yàn)?層的前饋網(wǎng)絡(luò)就能逼近任意的連續(xù)函數(shù)。
各層節(jié)點(diǎn)的輸出按下式計(jì)算

式中yi是節(jié)點(diǎn)輸出,xi是節(jié)點(diǎn)接收的信息,wij是相關(guān)連接權(quán)重,θi為閾值,n是節(jié)點(diǎn)數(shù)。
2用BP網(wǎng)絡(luò)進(jìn)行數(shù)據(jù)擬合
2.1基本原理
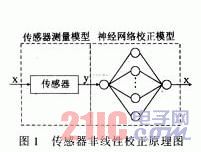
采用神經(jīng)網(wǎng)絡(luò)方法對(duì)傳感器輸出特性進(jìn)行數(shù)據(jù)擬合的原理圖由傳感器模型和神經(jīng)網(wǎng) 絡(luò)校正模型兩部分組成,如圖1所示。圖中,假設(shè)傳感器的靜態(tài)輸入輸出的特性為y=f(x)。采用實(shí)驗(yàn)值通過對(duì)BP網(wǎng)進(jìn)行訓(xùn)練,可以得到傳感器的逆模型x=f-1(y)。對(duì)于任意輸出yi,都可以找到輸入輸出特性曲線上對(duì)應(yīng)的輸入xi,從而實(shí)現(xiàn)了線性化。
2.2學(xué)習(xí)算法
BP網(wǎng)絡(luò)的基本學(xué)習(xí)算法是誤差反向傳播學(xué)習(xí)算法。這種算法簡(jiǎn)單、實(shí)用,但從數(shù)學(xué)上看它歸結(jié)為一非線性的梯度優(yōu)化問題,因此不可避免的存在局部極小問題,學(xué)習(xí)算法的收斂速度慢,通常需要上千次或更多。
近些年許多專家對(duì)學(xué)習(xí)算法進(jìn)行了廣泛的研究,現(xiàn)在已發(fā)展了許多的改進(jìn)學(xué)習(xí)算法,如快速下降法、Levenberg-Marquardt法等,收斂速度快,能滿足實(shí)時(shí)性要求。
其中Levenberg-Marquardt法簡(jiǎn)稱L-M算法,是一種將最陡下降法和牛頓法相結(jié)合的算法。它的本質(zhì)是二階梯度法,故具有很快的收斂速度。基于此,文中采用L-M算法來訓(xùn)練BP網(wǎng)絡(luò)。它不需要計(jì)算Hessian矩陣,而是利用式(3)進(jìn)行估算:

式中,J為Jacobian矩陣,包括網(wǎng)絡(luò)誤差項(xiàng)相對(duì)于權(quán)重和閾值的一階微分 ,e為網(wǎng)絡(luò)的誤差項(xiàng)。Jacobian矩陣可以利用標(biāo)準(zhǔn)的BP算法得出,這比直 接計(jì)算Hessian矩陣簡(jiǎn)單得多。LM算法的迭代式為:

如果比例系數(shù)μ=0,則為牛頓法,如果μ取值很大,則接近梯度下降法,每迭代成 功一步,則μ減小一些,這樣在接近誤差目標(biāo)的時(shí)候,逐漸與牛頓法相似。牛頓法在接近誤 差的最小值的時(shí)候,計(jì)算速度更快,精度也更高。實(shí)踐證明,采用該方法可以較原來的梯度 下降法提高速度幾十甚至上百倍。
2.3MATLAB中學(xué)習(xí)過程與仿真
MATLAB6.2中的神經(jīng)網(wǎng)絡(luò)工具箱功能強(qiáng)大,不但能方便創(chuàng)建常見的神經(jīng)網(wǎng)絡(luò),還支 持用戶自己構(gòu)造網(wǎng)絡(luò)。
在實(shí)際中,根據(jù)測(cè)量范圍和精度要求,以實(shí)驗(yàn)中的101個(gè)數(shù)據(jù)為樣本,在MATLAB中構(gòu)造BP網(wǎng)絡(luò)進(jìn)行訓(xùn)練。在訓(xùn)練之前,對(duì)數(shù)據(jù)進(jìn)行了預(yù)處理。諧振頻率值為輸入樣本P,將冰層厚度變換到[-1,1]的范圍后作為輸出樣本t。訓(xùn)練完后,再通過后處理還原回原來的樣本空間。神經(jīng)網(wǎng)絡(luò)模型為單輸入單輸出,隱含層有5個(gè)神經(jīng)元,訓(xùn)練中誤差指標(biāo)定為0.01。訓(xùn)練結(jié)果如圖2、圖3、表1。訓(xùn)練進(jìn)行了15步就滿足了誤差要求,收斂速度較快。



3結(jié)束語
神經(jīng)網(wǎng)絡(luò)作為一種分析、處理問題的新方法已經(jīng)在很多領(lǐng)域顯示了強(qiáng) 大的生 命力。由于神經(jīng)網(wǎng)絡(luò)具有高速并行計(jì)算能力和非線性變換能力,能夠隨時(shí)進(jìn)行再學(xué)習(xí)且學(xué)習(xí) 效率很高, 特別對(duì)于產(chǎn)品性能一致性不高的結(jié)冰傳感器更見其效果。相對(duì)其他校正方式而言,神經(jīng)網(wǎng)絡(luò) 無須深入了解對(duì)象的機(jī)理,具 有很強(qiáng)的曲線擬合能力。實(shí)驗(yàn)表明,補(bǔ)償?shù)男Ч钊藵M意,大大方便了結(jié)冰傳感器在測(cè)控系 統(tǒng)中的應(yīng)用。