基于隊列行駛的車聯(lián)網(wǎng)安全通信研究[通信與網(wǎng)絡(luò)][汽車電子]
發(fā)表于:5/31/2023 2:27:14 PM
基于超寬帶系統(tǒng)的雙卡爾曼濾波定位算法[通信與網(wǎng)絡(luò)][通信網(wǎng)絡(luò)]
發(fā)表于:5/31/2023 2:12:00 PM
電感參數(shù)可視化測量方法研究[測試測量][智能電網(wǎng)]
發(fā)表于:5/31/2023 2:05:45 PM
基于改進(jìn)模糊PID位置隨動系統(tǒng)控制[測試測量][工業(yè)自動化]
發(fā)表于:5/31/2023 1:59:12 PM
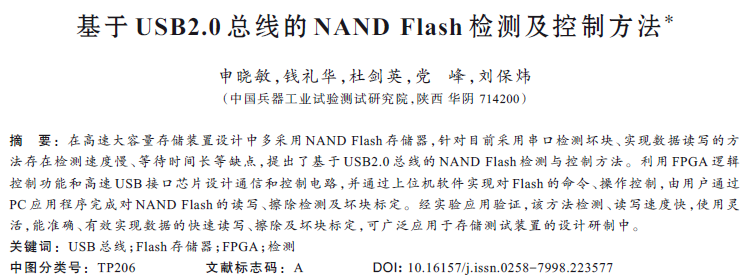
基于USB2.0總線的NAND Flash檢測及控制方法[測試測量][工業(yè)自動化]
發(fā)表于:5/31/2023 1:52:17 PM
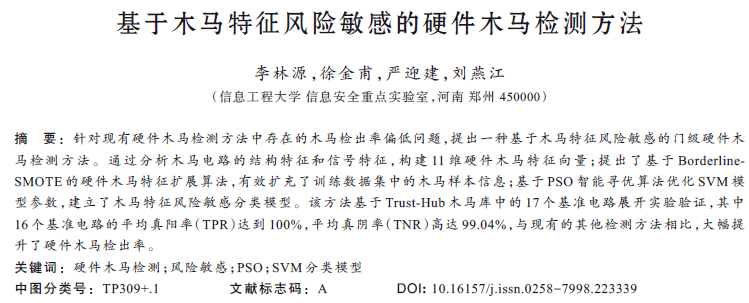
基于木馬特征風(fēng)險敏感的硬件木馬檢測方法[測試測量][信息安全]
發(fā)表于:5/31/2023 1:44:50 PM
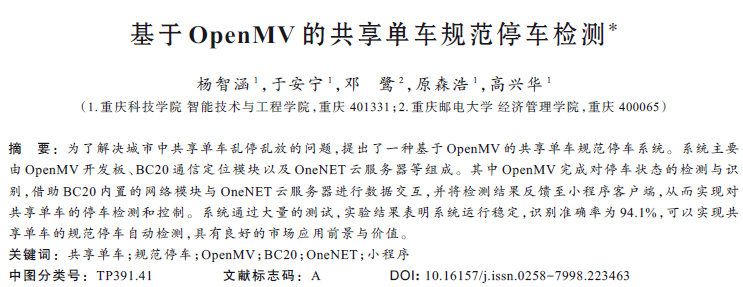
基于OpenMV的共享單車規(guī)范停車檢測[人工智能][智能交通]
發(fā)表于:5/31/2023 1:34:42 PM
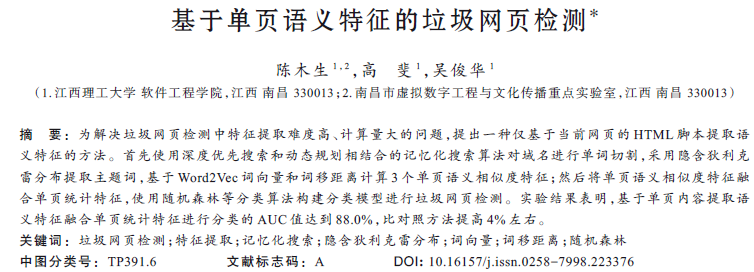
基于單頁語義特征的垃圾網(wǎng)頁檢測[人工智能][通信網(wǎng)絡(luò)]
發(fā)表于:5/31/2023 1:29:26 PM
基于動態(tài)圖卷積的點云補全網(wǎng)絡(luò)[人工智能][通信網(wǎng)絡(luò)]
發(fā)表于:5/31/2023 1:24:32 PM
紋理特征提取方法綜述[其他][其他]
發(fā)表于:5/31/2023 1:19:13 PM