
0 引言
PID控制器因算法簡單、魯棒性好、可靠性高,一直是工業(yè)生產(chǎn)過程中應(yīng)用最廣的控制器。然而,實際生產(chǎn)過程往往具有非線性、時變不確定性,應(yīng)用常規(guī)PID控制不能達(dá)到理想的控制效果。這時,往往不得不采用模型預(yù)測控制、自適應(yīng)控制等先進(jìn)控制策略來獲得更好的控制性能。但是也存在多種原因阻礙這些先進(jìn)控制策略在實際中的應(yīng)用。其中一個主要的原因就是由于這類先進(jìn)的控制算法在硬件、軟件和人員培訓(xùn)方面缺乏有效的支持,這阻礙了它們在DCS層上的實現(xiàn)。而且在參數(shù)整定方面,由于這類算法的參數(shù)常缺乏明確的物理意義,對于已熟悉PID參數(shù)整定的操作人員來說,也是不得不面對的問題。因此,近年來越來越多的研究人員就上層采用模型預(yù)測控制這類先進(jìn)的控制算法,而底層保留傳統(tǒng)的PID控制算法,即所謂的預(yù)測PID控制算法,展開了一系列的研究。如P.Vega等人直接將經(jīng)典PID的參數(shù)引入到性能指標(biāo)中,再通過Taylor近似處理得到了次優(yōu)化的控制器參數(shù)。Miller提出了一種隨機預(yù)測PID控制算法,其在數(shù)學(xué)上等于穩(wěn)態(tài)加權(quán)廣義預(yù)測控制算法,并先后成功應(yīng)于化肥廠熱交換器的溫度控制和廢水裝置溶氧濃度的控制。在文獻(xiàn)[5]中,MASARU KATAYAMA根據(jù)PID與一般GPC控制律之間的對應(yīng)關(guān)系,直接計算出PID參數(shù)的值,本文在其基礎(chǔ)上,采用階梯式策略,避免了參數(shù)整定過程中復(fù)雜的矩陣求逆運算,并給控制輸出引入較強的階梯約束,改善了控制性能的調(diào)節(jié)靈活性。另外,文中分析了該方法在整定大延時對象的控制器參數(shù)時所引起的誤差的原因,并通過引入smith預(yù)估器,有效地改善了這類系統(tǒng)的控制效果。
1 整定算法
1.1 系統(tǒng)描述及PID控制律介紹
考慮到GPC算法的需要,本文采用受控自回歸積分滑動平均模型(CARIMA)描述被控對象:![]()
其中,y(t)和u(t)為系統(tǒng)在t時刻的輸出值和控制量;ζ(t)為零均值、方差有界的白噪聲;k為系統(tǒng)的最小時延;△=1-z-1為差分算子;A(z-1)、B(z-1)分別為后移算子z-1的na和nb階多項式,且A(z-1)為首一多項式。
文中控制器采用I-PD型結(jié)構(gòu),該控制律在改變設(shè)定值時,控制器輸出不至于有太大的變化,增強了系統(tǒng)的抗擾動能力,另外可以很方便地得到此I-PD控制律與GPC控制律之間的聯(lián)系,從而可以依據(jù)GPC思想來進(jìn)行PID參數(shù)的整定。其具體形式為:
其中,e(t)=w(t)-y(t)為誤差信號,w(t)為參考信號,kc、Ti、Td分別為比例增益、積分時問和微分時間,Ts為采樣時間。對上式進(jìn)行展開整理可得如下形式:

1.2 SGPC算法
按照GPC的一般理論,由模型(1)和Diophantine方程,得到t時刻對未來t+k+i(i=0,1,L,P-1)時刻系統(tǒng)輸出的最優(yōu)預(yù)測:
為最優(yōu)預(yù)測中的自由響應(yīng)部分,F(xiàn)k+i(z-1)和Gk+i(z-1)是由Diophantine方程確定的z-1的多項式,![]() 是對象階躍響應(yīng)的第l項系數(shù),可以寫成矩陣形式Y(jié)=Y1+G·△U,則實際的輸出為Y=Y(jié)+E,E為誤差向量。
是對象階躍響應(yīng)的第l項系數(shù),可以寫成矩陣形式Y(jié)=Y1+G·△U,則實際的輸出為Y=Y(jié)+E,E為誤差向量。
GPC一般性能指標(biāo)為

其中△U1=(△ut△ut+1…△ut+m-1),m為控制步長,λ為控制增量的權(quán)重。
由上述各式,根據(jù)傳統(tǒng)的GPC算法,令J對△U1的偏導(dǎo)數(shù)為0,可以得到一個控制量序列[6,9],為簡化計算,Diophantine方程一般用遞推算法求解,但仍然不能避免矩陣求逆,計算量大,且不能保證矩陣可逆,計算中還會出現(xiàn)數(shù)值病態(tài)問題,在實際應(yīng)用中存在著較大的安全隱患。
為避免傳統(tǒng)GPC中的矩陣求逆問題,在算法中引入階梯式策略[6]。令

由Diophantine方程可知F(1)=Q,因此式(13)亦可表示為式(5)的形式,此時

1.3 整定結(jié)果
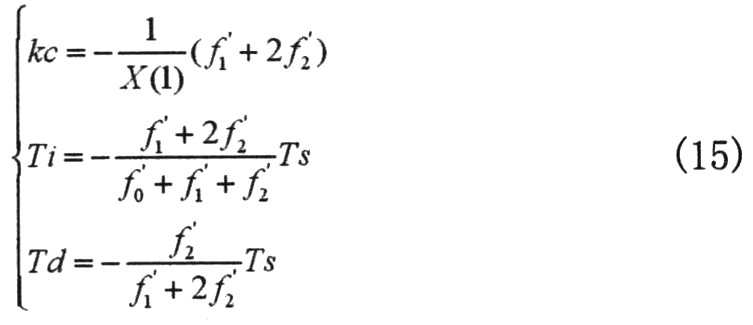
由式(4)與式(14)的對應(yīng)關(guān)系,我們可以比較得到PID控制器各參數(shù)(其中Ts為采樣周期)如下:
2 整定算法的分析
2.1 參數(shù)調(diào)節(jié)的問題
本文通過引入階梯因子,避免了參數(shù)整定過程中矩陣求逆,大大簡化了計算。同時,在實際系統(tǒng)中,由于執(zhí)行機構(gòu)性能的限制,若控制量變化頻率高,不僅執(zhí)行機構(gòu)動作跟不上,起不到作用,而且會增加執(zhí)行機構(gòu)的磨損。而階梯式策略假定控制增量服從一個等比序列,這相當(dāng)于給控制增量加了一個較強的限制。另外,由于引進(jìn)階梯因子后,加權(quán)因子λ性能的影響減小,而且其對于控制量的抵制作用也變得比較復(fù)雜,因此我們主要可以通過β來調(diào)節(jié)對應(yīng)PID控制器的魯棒性與快速性。
2.2 整定誤差的Smith補償
在前述的算法推導(dǎo)中,可以發(fā)現(xiàn),為了建立I-PD與SGPC之間的相互聯(lián)系,對多項式X(z-1)進(jìn)行了靜態(tài)處理,由式(12)與 式(13)可以看出,這樣的處理,相當(dāng)于認(rèn)為過去k+nb-1步的輸入變化量都相等,且等于當(dāng)前時刻的輸入變化量,即△ut-knb+1=△ut-k-nb+2=…=△ut,而實際運行中,在系統(tǒng)動態(tài)響應(yīng)階段,這種關(guān)系顯然總是不成立的。這種近似處理,在系統(tǒng)無延時或小延時,即k取值很小時,影響可以忽略,但隨著時延步數(shù)的加大,這種處理對系統(tǒng)魯棒性地影響必將逐漸加劇,所以需要對具有大延時的系統(tǒng)進(jìn)行補償。因此,本文在系統(tǒng)中引入Smith預(yù)估器,以消除系統(tǒng)的時延影響,改善大延時系統(tǒng)的控制效果。
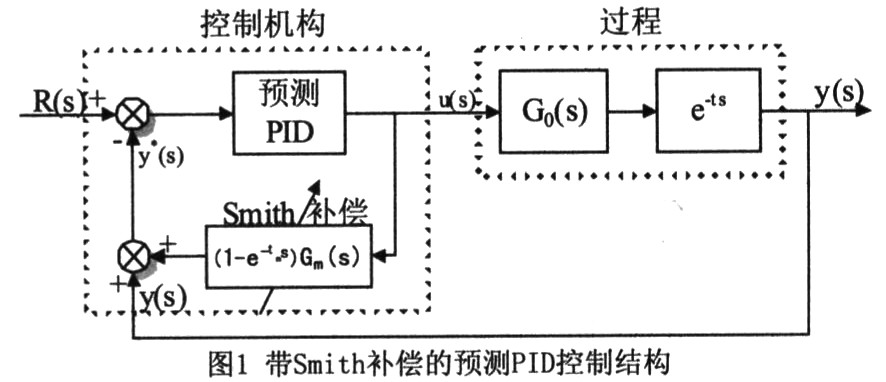
由于常規(guī)Smith預(yù)估器在模型失配時存在低魯棒性問題,因此在應(yīng)用中可采用文獻(xiàn)[8]中的自適應(yīng)方案,即首先通過單變量尋優(yōu)方法估計實際過程的純滯后,然后再用帶遺忘因子的最小二乘法辨識過程模型的其他參數(shù),以在線修正模型。這樣系統(tǒng)的控制結(jié)構(gòu)可以設(shè)計成圖1所示的形式。從圖中可以看出,若系統(tǒng)無延時,系統(tǒng)等同于簡單的預(yù)測PID控制回路,而當(dāng)系統(tǒng)有時延時,延時對系統(tǒng)的影響即可由smith預(yù)估器消除,而預(yù)測PID參數(shù)則僅需根據(jù)無時延模型Gm(s)來整定,這樣就可以避免時延帶來的參數(shù)整定誤差。
3 仿真及分析
為仿真需要,考慮以下單變量模型:

P=10,m=5,λ=1,B與k的值按仿真需要選取。

圖2所示為K=7,β分別取0.75、0.95、1.05與1.15時,PID控制系統(tǒng)(無Smith補償)的響應(yīng)輸出曲線,從圖中可見,基于SGPC整定的PID控制器的動態(tài)性能可以很容易地通過選擇不同的B值來調(diào)節(jié),以獲取合適的控制器參數(shù),隨著B取值的增加,系統(tǒng)的超調(diào)越小,響應(yīng)速度則越慢,充分保持了SGPC控制的這一特點。
圖3中,在110s處設(shè)定值發(fā)生幅值為20%、寬度為10s的脈沖擾動,以及在200s處,對象模型躍變?yōu)锳1(z-1)=1-0.99z-1+0.25z-2,以及B1(z-1)=0.57+O.31z-1。從圖中結(jié)果的對比可以看出,預(yù)測PID(β=0.95)比常規(guī)PID(Z-N法整定)控制器具有更好的動態(tài)響應(yīng)特性,并且在出現(xiàn)外部擾動以及對象內(nèi)部特性發(fā)生變化時體現(xiàn)出了更強的抗干擾性與魯棒性。


圖4則是在其他參數(shù)保持不變(β=1.35),時延步數(shù)分別取值為5、20、40與110時,系統(tǒng)(無Smith補償)的響應(yīng)特性曲線,可以發(fā)現(xiàn),隨著時延的增加,系統(tǒng)的超調(diào)量及響應(yīng)時間都有所增加,動態(tài)性能逐漸變差。由前文的分析可知,系統(tǒng)的動態(tài)響應(yīng)性能可以通過改變β的大小來調(diào)節(jié),另外在大時延系統(tǒng)中也可以通過引入Smith預(yù)估器來補償時延,這里以k=110為例,對這兩種方法進(jìn)行比較,結(jié)果如圖5所示(800s處模型躍變?yōu)锳1(z-1),B1(z-1)以及時延k變?yōu)?00)。很顯然,增加B的值,雖然可以很好地改善系統(tǒng)的超調(diào)量,但卻無法兼顧系統(tǒng)的響應(yīng)時間,這對于那些對系統(tǒng)超調(diào)及響應(yīng)時間都有要求的對象來說是不可取的,而加入Smith預(yù)估補償?shù)姆椒ǎ瑒t可以消除延時的影響,使大時延系統(tǒng)的超調(diào)量及響應(yīng)速度都得到大大改善,并且很好地保持了系統(tǒng)的魯棒性。
4 結(jié)論
文中討論了基于SGPC的PID參數(shù)整定問題。仿真結(jié)果表明,此方法較常規(guī)PID具有更好的控制性能,而且自適應(yīng)Smith預(yù)估器的引入可以克服大時延系統(tǒng)的整定誤差,并且充分保持了系統(tǒng)的魯棒性。本研究為工業(yè)過程控制中的大滯后、時變等復(fù)雜系統(tǒng)的控制提供了一種良好的選用方案。