
引 言
傳感器是現(xiàn)行研究的壓鑄機(jī)實(shí)時(shí)檢測(cè)與控制系統(tǒng)" title="控制系統(tǒng)">控制系統(tǒng)的關(guān)鍵部件,系統(tǒng)利用傳感器對(duì)壓鑄機(jī)的各重要電控參數(shù) (如:合型力、油壓、壓射速度、模具溫度等)進(jìn)行檢測(cè),并進(jìn)行準(zhǔn)確控制。這一過(guò)程中,各傳感器輸出信號(hào)的質(zhì)量尤為重要,其優(yōu)劣程度直接影響壓鑄機(jī)控制系統(tǒng)分析、處理數(shù)據(jù)的準(zhǔn)確性,最終影響壓鑄件產(chǎn)品質(zhì)量的優(yōu)劣。由于大型壓鑄機(jī)生產(chǎn)環(huán)境較為惡劣,長(zhǎng)期的高溫、高壓、高粉塵及來(lái)自周邊器械的電磁干擾等因素的存在,不可避免地會(huì)造成傳感器軟硬故障的發(fā)生,有故障的傳感器所發(fā)出的錯(cuò)誤信號(hào),會(huì)使整個(gè)壓鑄機(jī)控制系統(tǒng)分析、處理和控制功能紊亂,造成系統(tǒng)無(wú)法正常運(yùn)行,帶來(lái)無(wú)法估計(jì)的生產(chǎn)安全隱患及嚴(yán)重的后果。因此,對(duì)壓鑄機(jī)控制系統(tǒng)中傳感器故障診斷" title="故障診斷">故障診斷方法的研究具有重要的意義。
人工神經(jīng)網(wǎng)絡(luò)(神經(jīng)網(wǎng)絡(luò))是傳感器故障診斷的方法之一。神經(jīng)網(wǎng)絡(luò)是有大量人工神經(jīng)元相互連接而構(gòu)成的網(wǎng)絡(luò)。它以分布的方式存儲(chǔ)信息,利用網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)和權(quán)值" title="權(quán)值">權(quán)值分布實(shí)現(xiàn)非線性的映射,并利用全局并行處理實(shí)現(xiàn)從輸入空間到輸出空間的非線性信息變換。對(duì)于特定問(wèn)題適當(dāng)建立神經(jīng)網(wǎng)絡(luò)診斷系統(tǒng),可以從其輸入數(shù)據(jù)(代表故障癥狀)直接推出輸出數(shù)據(jù)(代表故障原因),從而實(shí)現(xiàn)非線性信息變換。層狀結(jié)構(gòu)的神經(jīng)網(wǎng)絡(luò)輸入層、輸出層及介于二者之間的隱含層構(gòu)成。依據(jù)用于輸入層到輸出層之間計(jì)算的傳遞函數(shù)不同,提出一種基于徑向基函數(shù)RBF神經(jīng)網(wǎng)絡(luò)的傳感器故障診斷策略。
1 RBF神經(jīng)網(wǎng)絡(luò)的模型
徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)(RBFNN)是一種新型神經(jīng)網(wǎng)絡(luò),屬于多層前饋網(wǎng)絡(luò),即前后相連的兩層之間神經(jīng)元相互連接,在各神經(jīng)元之間沒(méi)有反饋。RBFNN的三層結(jié)構(gòu)與傳統(tǒng)的BP網(wǎng)絡(luò)結(jié)構(gòu)相同,由輸入層、隱含層和輸出層構(gòu)成,其結(jié)構(gòu)見(jiàn)圖1。其中,用隱含層和輸出層的節(jié)點(diǎn)計(jì)算的功能節(jié)點(diǎn)稱計(jì)算單元。
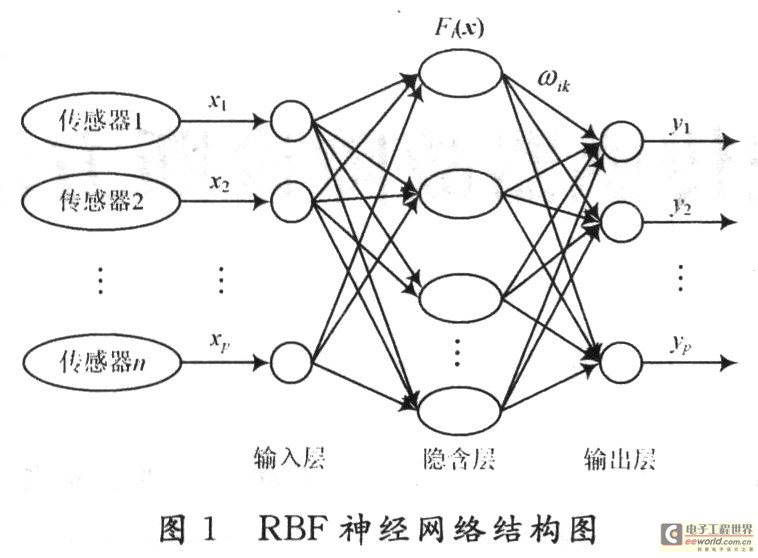
RBF神經(jīng)網(wǎng)絡(luò)輸入層、隱含層、輸出層的節(jié)點(diǎn)數(shù)分別為n,m,p;設(shè)輸人層的輸入為x=(x1,x2,…,xj,…,xn),實(shí)際輸出為Y=(y1, y2,…,yk,…,yp)。輸入層節(jié)點(diǎn)不對(duì)輸入向量做任何操作,直接傳遞到隱含層,實(shí)現(xiàn)從X→Fi(x)的非線性映射。隱含層節(jié)點(diǎn)由非負(fù)非線性高斯徑向基函數(shù)構(gòu)成,如式(1)所示。
![]()
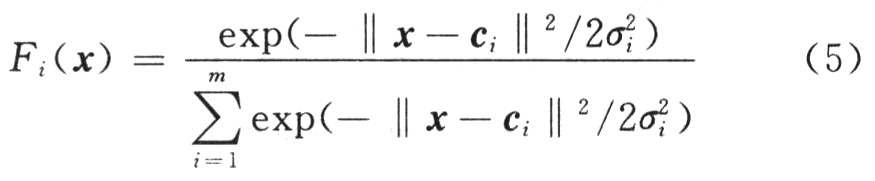
式中:Fi(x)為第i個(gè)隱含層節(jié)點(diǎn)的輸出;x為n維輸入向量;ci為第i個(gè)基函數(shù)的中心,與x具有相同維數(shù)的向量;σi為第i個(gè)感知的變量,它決定了該基函數(shù)圍繞中心點(diǎn)的寬度;m為感知單元的個(gè)數(shù)(隱含層節(jié)點(diǎn)數(shù))。|| x-ci||為向量x-ci的范數(shù),通常表示x與ci之間的距離;Fi(x)在ci處有一個(gè)惟一的最大值,隨著|| x-ci||的增大,F(xiàn)i(x)迅速衰減到零。對(duì)于給定的輸入,只有一小部分靠近x的中心被激活。隱含層到輸出層采用從Fi(x)→yk的線性映射,輸出層第k個(gè)神經(jīng)元網(wǎng)絡(luò)輸出見(jiàn)式(2):

式中:yk為輸出層第k個(gè)神經(jīng)元的輸出;m為隱層節(jié)點(diǎn)數(shù);p為輸出層節(jié)點(diǎn)數(shù);ωik為隱層第i個(gè)神經(jīng)元與輸出層第k個(gè)神經(jīng)元的連接權(quán)值。
RBF網(wǎng)絡(luò)的權(quán)值算法是單層進(jìn)行的。它的工作原理采用聚類功能,由訓(xùn)練得到輸入數(shù)據(jù)的聚類中心,通過(guò)δ值調(diào)節(jié)基函數(shù)的靈敏度,也就是RBF曲線的寬度。雖然網(wǎng)絡(luò)結(jié)構(gòu)看上去是全連接的,實(shí)際工作時(shí)網(wǎng)絡(luò)是局部工作的,即對(duì)輸人的一組數(shù)據(jù),網(wǎng)絡(luò)只有一個(gè)神經(jīng)元被激活,其他神經(jīng)元被激活的程度可忽略。所以RBF網(wǎng)絡(luò)是一個(gè)局部逼近網(wǎng)絡(luò),這使得它的訓(xùn)練速度要比BP網(wǎng)絡(luò)快2~3個(gè)數(shù)量級(jí)。當(dāng)確定了RBF網(wǎng)絡(luò)的聚類中心ci、權(quán)值ωik以后,就可求出給定某一輸入時(shí),網(wǎng)絡(luò)對(duì)應(yīng)的輸出值。
2 算法學(xué)習(xí)
在此采用模糊K均值聚類算法" title="聚類算法">聚類算法來(lái)確定各基函數(shù)的中心及相應(yīng)的方差,而網(wǎng)絡(luò)權(quán)值的確用局部梯度下降法來(lái)修正,算法如下:
2.1 利用模糊K均值聚類算法確定基函數(shù)中心ci
(1)隨即選擇h個(gè)樣本作為ci(i=1,2,…,h)的初值。其他樣本與中心ci歐氏距離遠(yuǎn)近歸人沒(méi)一類,從而形成h個(gè)子類ai(i=1,2,…,h);
si
(2)重新計(jì)算各子類中心ci的值, 其中,xk∈ai;si為子集ai的樣本數(shù),同時(shí)計(jì)算每個(gè)樣本屬于每個(gè)中心的隸屬度為:
其中,xk∈ai;si為子集ai的樣本數(shù),同時(shí)計(jì)算每個(gè)樣本屬于每個(gè)中心的隸屬度為:

(3)確定ci是否在容許的誤差范圍內(nèi),若是則結(jié)束,不是則根據(jù)樣本的隸屬度調(diào)整子類個(gè)數(shù),轉(zhuǎn)到(2)繼續(xù)。
2.2 確定基函數(shù)的寬度(誤差σ)

式中:ai是以ci為中心的樣本子集。
基函數(shù)中心和寬度參數(shù)確定后,隱含層執(zhí)行的是一種固定不變的非線性變換,第i個(gè)隱節(jié)點(diǎn)輸出定義為:
2.3 調(diào)節(jié)隱層單元到輸出單元間的連接權(quán)
網(wǎng)絡(luò)的目標(biāo)函數(shù)為:

也就是總的誤差函數(shù)。式中:y(xk)是相對(duì)于輸入xk的實(shí)際輸出;y(xk)是相對(duì)于xk的期望輸出;N為訓(xùn)練樣本集中的總樣本數(shù)。對(duì)于RBFNN,參數(shù)的確定應(yīng)能是網(wǎng)絡(luò)在最小二乘意義下逼近所對(duì)應(yīng)的映射關(guān)系,也就是使E達(dá)到最小。因此,這里利用梯度下降法修正網(wǎng)絡(luò)隱含層到輸出層的權(quán)值ω,使目標(biāo)函數(shù)達(dá)到最小。

式中:η為學(xué)習(xí)率,取值為0~1之間的小數(shù)。根據(jù)上面式(6),式(7)最終可以確定權(quán)值叫的每步調(diào)整量:


圖2中虛線框所示部分即為RBFNN觀測(cè)器原理。基本思想:通過(guò)正常情況下非線性系統(tǒng)的實(shí)際輸入和傳感器的輸出學(xué)習(xí)系統(tǒng)的特性,用已經(jīng)訓(xùn)練好的觀測(cè)器的輸出于實(shí)際系統(tǒng)的輸出做比較,將兩者之差做殘差,再對(duì)殘差進(jìn)行分析、處理,得到故障信息,并利用殘差信號(hào)對(duì)傳感器故障原因進(jìn)行診斷。
非線性系統(tǒng):

式中:y(k)是傳感器實(shí)際輸出;u(k)是系統(tǒng)實(shí)際輸入;f(·)代表某個(gè)未知的動(dòng)態(tài)系統(tǒng)(壓鑄機(jī))的非線性關(guān)系;n,l,d分別代表系統(tǒng)結(jié)構(gòu)的階次和時(shí)間延遲,并且假設(shè)u(k),y(k)是可測(cè)的。
利用RBF神經(jīng)網(wǎng)絡(luò)模型的徑向基函數(shù)來(lái)逼近f(·)。將函數(shù):

作為RBF神經(jīng)網(wǎng)絡(luò)訓(xùn)練模型輸入層的輸入,通過(guò)上述隱含層高斯徑向基函數(shù)進(jìn)行非線性變換,再利用上述模糊K均值聚類算法來(lái)選取聚類中心和訓(xùn)練權(quán)值,最后得到整個(gè)網(wǎng)絡(luò)的輸出:
![]()
式中:y(k)為輸出層的輸出;ωi為修正后的權(quán)值;Fi(k)為第i個(gè)隱層節(jié)點(diǎn)的輸出;θ為輸出層節(jié)點(diǎn)的閥值,并將y(k)與當(dāng)前系統(tǒng)的實(shí)際輸出y (k)進(jìn)行比較,得到殘差δ(k)。若δ(k)小于預(yù)定閥值θ,表示傳感器正常工作,此時(shí)采用系統(tǒng)實(shí)際輸出的數(shù)據(jù);若δ(k)大于預(yù)定閥值θ,說(shuō)明傳感器發(fā)生故障,此時(shí)采用RBFNN觀測(cè)器的觀測(cè)數(shù)據(jù)作為系統(tǒng)的真實(shí)輸出,實(shí)現(xiàn)信號(hào)的恢復(fù)功能。
3.2 仿真實(shí)驗(yàn)
在壓鑄機(jī)系統(tǒng)各傳感器正常工作時(shí)連續(xù)采集52組相關(guān)數(shù)據(jù),將其分成2組,前40組用于對(duì)RBF神經(jīng)網(wǎng)絡(luò)進(jìn)行離線訓(xùn)練,以構(gòu)建RBF神經(jīng)網(wǎng)絡(luò)觀測(cè)器;后12組用于對(duì)訓(xùn)練好的網(wǎng)絡(luò)進(jìn)行測(cè)試。表1為訓(xùn)練樣本庫(kù)中的部分?jǐn)?shù)據(jù)。

由于表1中的4個(gè)參數(shù)的物理意義、量級(jí)各不相同,必須經(jīng)過(guò)歸一化處理后才能用于神經(jīng)網(wǎng)絡(luò)的訓(xùn)練,用Mat-lab的Simulink仿真工具箱提供的函數(shù)對(duì)數(shù)據(jù)進(jìn)行歸一化處理使數(shù)據(jù)位于[-1,1]之間。訓(xùn)練結(jié)束后切斷學(xué)習(xí)過(guò)程使網(wǎng)絡(luò)處于回想狀態(tài),將系統(tǒng)實(shí)際輸出與網(wǎng)絡(luò)模型的輸出相減就可以獲得殘差。以合型力傳感器" title="力傳感器">力傳感器為例,采樣時(shí)間為O.5 s,利用上面的學(xué)習(xí)樣本在時(shí)間T∈[1 s,1 000 s]內(nèi)對(duì)RBF神經(jīng)網(wǎng)絡(luò)進(jìn)行訓(xùn)練,結(jié)果經(jīng)過(guò)約50步訓(xùn)練誤差就達(dá)到10_并急劇減少,如圖3所示。

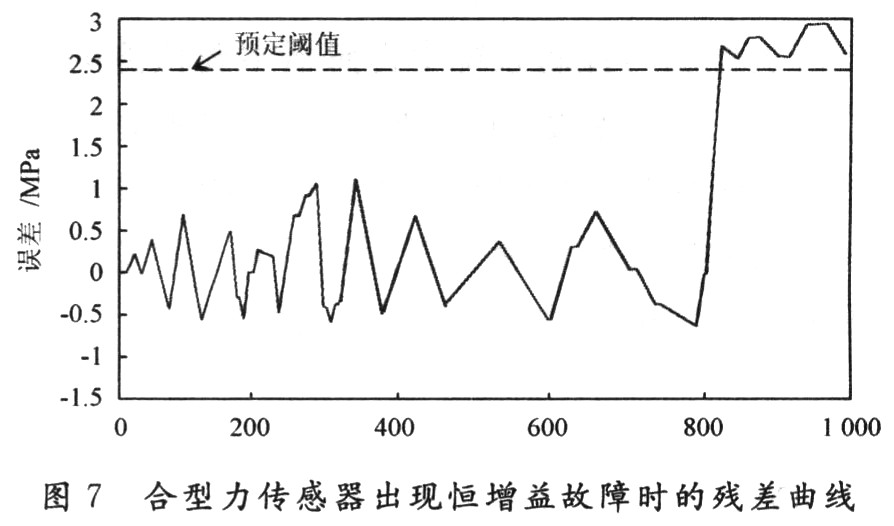
圖4為用后12組數(shù)據(jù)對(duì)RBF神經(jīng)網(wǎng)絡(luò)進(jìn)行測(cè)試時(shí),Y跟蹤正常合型力傳感器測(cè)量值y的情況,其最大誤差不超過(guò)1.5 MPa,所以訓(xùn)練好的RBF神經(jīng)網(wǎng)絡(luò)具有一定的泛化能力,可以較好的觀測(cè)、跟蹤合型機(jī)構(gòu)現(xiàn)狀。現(xiàn)針對(duì)傳感器經(jīng)常發(fā)生的卡死故障、漂移故障和恒增益故障進(jìn)行模擬仿真實(shí)驗(yàn)。當(dāng)合型力傳感器正常工作時(shí),RBFNN觀測(cè)器輸出Y與合型力傳感器測(cè)量值y之間的殘差δ=|y-y|近似為高斯白噪聲序列,其均值近似為零;當(dāng)傳感器發(fā)生故障時(shí),由于y不能準(zhǔn)確反應(yīng)合型力數(shù)據(jù),導(dǎo)致δ突變,不再滿足白噪聲特性。根據(jù)上面所述的傳感器故障診斷原理,設(shè)定閥值θ=2.7 MPa,圖5表示合型力傳感器在T∈[400 s,600 s]內(nèi)發(fā)生卡死故障時(shí)的輸出殘差曲線;圖6表示傳感器在T∈[600 s,1 000 s]內(nèi)發(fā)生漂移故障;圖7表示傳感器在T∈[800 s,1 000s]內(nèi)發(fā)生恒增益故障時(shí)的輸出殘差曲線。通過(guò)對(duì)各類典型故障的仿真實(shí)驗(yàn),能夠準(zhǔn)確檢測(cè)到合型力傳感的各類故障。
4 結(jié) 語(yǔ)
在此依據(jù)徑向基(RBF)神經(jīng)網(wǎng)絡(luò)原理,以壓鑄機(jī)控制系統(tǒng)各傳感器的輸出參數(shù)作為RBF神經(jīng)網(wǎng)絡(luò)的輸入,采用模糊K均值聚類算法選取聚類中心,建立傳感器 RBF神經(jīng)網(wǎng)絡(luò)觀測(cè)器模型對(duì)控制系統(tǒng)傳感器進(jìn)行故障診斷,仿真實(shí)驗(yàn)表明徑向基神經(jīng)網(wǎng)絡(luò)具有較強(qiáng)的非線性處理和逼近能力,泛化能力強(qiáng),網(wǎng)絡(luò)運(yùn)算速度快,能夠準(zhǔn)確發(fā)現(xiàn)和處理故障信號(hào),性能穩(wěn)定。因此,RBF神經(jīng)網(wǎng)絡(luò)故障診斷是壓鑄機(jī)控制系統(tǒng)一個(gè)必不可少的新管理工具。