
摘 要: 從分析人工神經(jīng)網(wǎng)絡" title="人工神經(jīng)網(wǎng)絡">人工神經(jīng)網(wǎng)絡的設計原理入手,闡述了全數(shù)字" title="全數(shù)字">全數(shù)字電路人工神經(jīng)網(wǎng)絡的設計方法,。通過一個小規(guī)模前饋人工神經(jīng)網(wǎng)絡的設計實例,,簡要說明了利用VHDL語言及編譯平臺,完成一種可調(diào)整權值" title="權值">權值的通用人工神經(jīng)網(wǎng)絡的設計算法和流程,。
關鍵詞: 人工神經(jīng)網(wǎng)絡 VHDL 數(shù)字電路
人工神經(jīng)網(wǎng)絡(ANN)是一門起始于19世紀90年代,,復興于20世紀80年代的綜合性學科,涉及生物,、電子,、計算機、物理等多種學科,,有著非常廣泛的應用前景,。長期以來,人們都在想方設法了解人腦的功能,,用物理可實現(xiàn)系統(tǒng)去模仿人腦的神經(jīng)網(wǎng)絡,。其實現(xiàn)方法是多種多樣的,總的來說可分為兩種:一種是利用現(xiàn)代高性能的計算機形成具有模擬能力的通用軟件來完成神經(jīng)網(wǎng)絡的預期功能,;另一種是利用硬件直接實現(xiàn)神經(jīng)網(wǎng)絡,,如模擬VLSI 實現(xiàn)、數(shù)字VLSI 實現(xiàn),、模數(shù)混合VLSI 實現(xiàn),。
迄今為止,,人們利用C、Basic等高級語言開發(fā)了很多神經(jīng)網(wǎng)絡軟件包,,實現(xiàn)了許多算法和模型,,但是用軟件模擬的神經(jīng)網(wǎng)絡并不能達到真正的并行處理,且對計算機性能要求很高,;硬件實現(xiàn)中的模擬VLSI,,雖然速度快和集成度高、便于實現(xiàn)非線性運算,,但精度低,、對噪音和溫度的變化非常敏感、設計復雜,、突觸權值存儲困難,;而硬件實現(xiàn)的數(shù)字VLSI,雖然免疫力強,、速度快, 但是部件(如乘法器" title="乘法器">乘法器) 占芯片面積大[1],。不過,隨著大規(guī)模集成電路和HDL語言的不斷發(fā)展,,數(shù)字VLSI設計日益成熟,,EDA設計工具的不斷更新?lián)Q代,使得全數(shù)字電路ANN的實現(xiàn)工藝難度越來越小,,集成度和可靠性越來越高,;同時FPGA的現(xiàn)場可編程特性,又使得ANN的調(diào)整更加方便快捷,,因而數(shù)字VLSI逐步成為ANN實現(xiàn)的發(fā)展主流,。本文通過一個小規(guī)模前饋ANN的設計實例,簡要說明利用VHDL以及QuartusII編譯平臺完成一種可調(diào)整權值的通用ANN的設計算法和流程,。
1 人工神經(jīng)網(wǎng)絡的實現(xiàn)原理
人工神經(jīng)網(wǎng)絡就是采用物理可實現(xiàn)系統(tǒng)模仿人腦神經(jīng)細胞的結構和功能的系統(tǒng)[2],。它把很多處理單元有機地連接起來形成網(wǎng)絡,進行并行的工作,;通過模擬生物神經(jīng)細胞發(fā)出信息脈沖,,控制網(wǎng)絡的運行。神經(jīng)細胞單元的信息是寬度和幅度都相同的脈沖串" title="脈沖串">脈沖串,,而脈沖串的間隔則是隨機變化的,。例如某個神經(jīng)細胞單元興奮,其軸突輸出的脈沖串的平均頻率就高,;若細胞單元不興奮,,則脈沖頻率就低甚至沒有脈沖。多個神經(jīng)細胞單元的軸突脈沖可以加權,,形成細胞單元的電位變化,,電位變化累加超過一定閾值,,就產(chǎn)生一個脈沖,通過控制閾值大小,,就可以控制脈沖,。人工神經(jīng)元的示意圖如圖1所示。
圖中,x1…xn表示其他神經(jīng)元的軸突輸出脈沖,,ω1…ωn為其他神經(jīng)元與第i個神經(jīng)元的突觸連接,,ωi可正可負,分別表示興奮和抑制,,則:
在式(1.1)中,,si表示神經(jīng)元i突觸后的累加值,θi為閾值,。在式(1.3)中,,vi為神經(jīng)元i的狀態(tài),yi為神經(jīng)元i的輸出,,它是一個單調(diào)上升的函數(shù),,且為有限值,這是由于生物體中神經(jīng)元脈沖發(fā)放率有一個最大值,,不能無限上升的緣故,。
總之,,人工神經(jīng)網(wǎng)絡由很多幾乎相同的單元組成,,這些神經(jīng)元的輸入與輸出的函數(shù)關系為單調(diào)上升的非線性關系,它們之間的連接采用權的辦法實現(xiàn),,每個神經(jīng)元的輸入是其他神經(jīng)元輸出的加權和,,因此在電路實現(xiàn)中需要完成:
(1)實現(xiàn)神經(jīng)元輸入與輸出的線性關系。
(2)實現(xiàn)兩個信號的相乘,。在神經(jīng)網(wǎng)絡中權的數(shù)量很多,,加權的計算都用乘法完成,因此對應于兩個信號相乘的電路必不可少,。
(3)實現(xiàn)加權后脈沖累加,。
2 一種前饋人工神經(jīng)網(wǎng)絡的全數(shù)字電路模型
在全數(shù)字電路組成的人工神經(jīng)網(wǎng)絡中,乘法是利用與門進行的,。如圖2所示,,兩個脈沖序列通過“與”以后的輸出即為二者的乘積;兩個脈沖序列的占空比為1/2和1/3,,相“與”后,,脈沖序列的占空比為1/6,從而達到相乘的目的,。

?

權存儲在寄存器中,,寄存器可以與外界的計算機內(nèi)存或EPROM相聯(lián),,因而權可從外面寫入。這意味著權的存儲和權的改變沒有什么困難,,可以設計出可重構的人工神經(jīng)網(wǎng)絡模型,。
累加器是用計數(shù)器完成的,從乘法器輸出的脈沖串經(jīng)過計數(shù)器實現(xiàn)累加,,當累加到達閾值時即作為神經(jīng)元的一個狀態(tài)輸出,。
圖3給出了一個簡單的前饋人工神經(jīng)網(wǎng)絡的結構示意圖[3]。圖中,,xi代表第i個輸入,,wij代表輸入i與神經(jīng)元j之間的權值,yj是第j個神經(jīng)元的輸出,。則:

式中,, f( )是激化函數(shù)(如線性閾值的sigmoid的函數(shù))。
根據(jù)ANN的設計實現(xiàn)原理,,可以把圖3所示的網(wǎng)絡結構設計成如圖4所示的數(shù)字電路結構,。

?
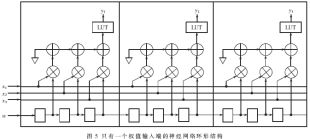
圖4中,每個矩形框內(nèi)部的電路構成一個神經(jīng)元,,在垂直方向上有幾組移位寄存器,,在水平方向上有個大的環(huán)形結構。垂直的環(huán)形移位寄存器存儲著前面所有的權值,,水平環(huán)行移位寄存器中裝載的是輸入信號,。每個權值在自己的移位寄存器中的相對位置必須和輸入值匹配。在每個垂直的環(huán)形移位存儲器輸出端有一個乘法器/累加器電路,,用于對權值和輸入信號進行乘-累加運算,。運算的結果送給查找表(LUT),用于實現(xiàn)激化函數(shù),,得到輸出yi,。
這個電路只用到了三個乘法器,有效地節(jié)省了資源,。但是各個權值單獨輸入,,不便于外部調(diào)整,不適于通用人工神經(jīng)網(wǎng)絡的編程,。為此,,設計如圖5所示電路。圖中,,只使用一個輸入端口加載所有的權值,,權值按照順序移位,直到每個寄存器都存儲相應的權值,然后權值與輸入相乘并累加,,最終得到期望的輸出結果,。
3 VHDL語言的編程實現(xiàn)
為了使設計具有通用性,按照圖5的結構用二維數(shù)組表示輸入和輸出,,并自定義一個程序包,,用來定義數(shù)組的數(shù)據(jù)類型:verctor_array_in和vector_array_out。由于程序包中的參數(shù)是通用的,,可被多個實體即電路塊調(diào)用,,因而大大地提高了設計效率。
人工神經(jīng)網(wǎng)絡設計權值通用程序包如下:
LIBRARY IEEE,;
USE IEEE.std_logic_1164.ALL;
use ieee.std_logic_arith.all;
package currency_data_type is
constant b:integer:=3;——輸入位數(shù)或者權重,,改變b的值,可以調(diào)整網(wǎng)絡的規(guī)模和大小
type vector_array_in is array(natural range〈〉) of signed (b-1 downto 0);
type vector_array_out is array(natural range〈〉) of signed (2*b-1 downto 0);
end currency_data_type;
同時,,將輸入位數(shù),、神經(jīng)元的數(shù)目以及每個神經(jīng)元的權重等參數(shù)放入類屬說明中,由設計實體即設計電路外部提供,,因而設計者可以根據(jù)需要方便地調(diào)整網(wǎng)絡的結構和規(guī)模,。
具體程序如下:
ENTITY dann IS
generic(n: integer :=3;——加入類屬說明,可從外部通過類屬參量重新設定電路規(guī)模
m: integer :=3;
b: integer :=3);
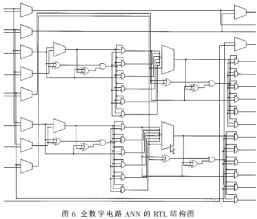
編寫完的程序經(jīng)過編譯綜合,,便可得到如圖6所示的門電路,。
4 仿真分析
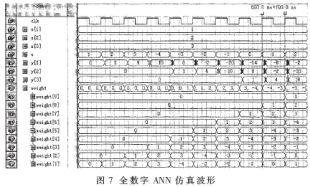
經(jīng)過QuartusII對程序綜合編譯之后,還需要對電路進行波形仿真,,以檢驗設計的正確性和程序的實用性,。波形仿真如圖7所示。
為了觀測方便,,在仿真時把輸入信號固定為x1=1,,x2=2,,x3=3,,時鐘周期為10MHz。程序中共有九個權值,,需要九個時鐘周期來移入,。因此到第9個周期的時候,由圖7可知,,權值weight[1..9]分別為[0,-1,-2,-3,-4,3,2,1,0],則輸出為:
由于選用的FPGA器件不同,芯片內(nèi)部產(chǎn)生延遲,,導致波形中毛刺出現(xiàn),但相對于模擬電路,,精度和穩(wěn)定性仍有很大的提高,。在實際的系統(tǒng)設計中,可以根據(jù)需要并結合成本考慮選擇恰當?shù)男酒螺d。
?
通過上面的設計,,不難發(fā)現(xiàn),,數(shù)字電路在權值累加和非線性函數(shù)的計算上比較麻煩,綜合編譯的時候,,數(shù)字乘法器占用的資源巨大,,尤其是隨著神經(jīng)元和輸入位數(shù)的增加,成平方倍增長,。但是,,以一套較好的EDA工具為平臺,使用VHDL語言從頂至下設計全數(shù)字電路的人工神經(jīng)網(wǎng)絡,,不僅能夠避開電路搭配的繁瑣,,縮短設計周期,提高設計效率,,而且由于FPGA器件的現(xiàn)場可編程特性,,可以靈活控制網(wǎng)絡的規(guī)模和結構,設計出可通用的網(wǎng)絡模型,,大大節(jié)省了開發(fā)周期,,延長了設計壽命。
參考文獻
1 Keulan E et al. Neural network hardware performance criteria.In:Proc of the IEEE Conf on Neural Networks,Vol. Florida,1994. 1885~1888
2 張立明. 人工神經(jīng)網(wǎng)絡的模型及其應用.上海:復旦大學出版社, 1993:3~4
3 喬廬峰(譯).VHDL數(shù)字電路設計教程.北京:電子工業(yè)出版社, 2005:243~250
4 潘 松.VHDL實用教程.成都:電子科技大學出版社,2000
5 羅 莉. 數(shù)字神經(jīng)元芯片的設計與應用.計算機研究與發(fā)展, 1998:798~802