
摘 要: 在介紹基本CORDIC" title="CORDIC">CORDIC算法原理的基礎(chǔ)上,介紹了其改進(jìn)的并行算法原理。對并行CORDIC算法進(jìn)行了詳細(xì)敘述,并且使用Verilog HDL描述了該算法。通過模塊復(fù)用,并且采用兩相門控時(shí)鐘等方法,節(jié)省了FPGA" title="FPGA">FPGA資源,保持了信號的同步性。最后在Quartus II下進(jìn)行了綜合、仿真,取得了良好的仿真結(jié)果。
關(guān)鍵詞: CORDIC BBR" title="BBR">BBR MAR" title="MAR">MAR FPGA
CORDIC(Coordinated Rotation Digital Computer),即協(xié)調(diào)旋轉(zhuǎn)數(shù)字計(jì)算機(jī),可廣泛應(yīng)用于基本函數(shù)的計(jì)算,如DSP、FFT、DCT等技術(shù)函數(shù)的計(jì)算。CORDIC算法是Jack Volder于1959年首先提出的。為了擴(kuò)展可解決的基本函數(shù)個(gè)數(shù),J.Walter于1971年提出了統(tǒng)一的CORDIC算法(The Unified Cordic Algorithms);2004年,Tso-Bing Juang等又提出了一種改進(jìn)的并行的CORDIC算法,該改進(jìn)的算法主要運(yùn)用BBR(Binary-To-Bipolar Recoding)和MAR(Microrotation Angle Recoding),大大提高了CORDIC算法的迭代速度,并且達(dá)到了很高的精度。隨著可編程邏輯器件規(guī)模的增大和應(yīng)用范圍的擴(kuò)大,使得利用硬件電路實(shí)現(xiàn)該算法成為可能并具有良好的應(yīng)用價(jià)值。
1 CORDIC算法原理
CORDIC算法可分為旋轉(zhuǎn)(rotation)和定向(vectoring)兩種方式,還可分為圓形坐標(biāo)、雙曲線坐標(biāo)和線形坐標(biāo)三種方式,圓形坐標(biāo)下旋轉(zhuǎn)方式的原理公式如下:

式中,{xi,yi}和{xi+1,yi+1}分別表示旋轉(zhuǎn)前后的向量,σi∈{-1,1}表示每次旋轉(zhuǎn)的方向。
從公式可知,該運(yùn)算只有移位和相加(相減)運(yùn)算。為了獲得σi的值,需另設(shè)一個(gè)變量zi表示每次旋轉(zhuǎn)后的角度與目標(biāo)角度的差值,然后利用公式zi+1=zi-σi·arctan(2-i)進(jìn)行計(jì)算。根據(jù)Jack Volder的推導(dǎo),經(jīng)過n次迭代,最終可以得到迭代公式如下:

通過上面的算法介紹可以看出,每次都要先通過計(jì)算zi+1和zi才能得到σi的值,這樣降低了運(yùn)算速度。參考文獻(xiàn)[3]就是在此基礎(chǔ)上,提出了一種提前算出σi的方法,使得速度得以提高。
2 并行CORDIC算法原理
把需要旋轉(zhuǎn)的角度θ范圍限定在[-π/4~π/4]之間,并把它分解成下式:

3 利用FPGA實(shí)現(xiàn)算法
利用FPGA實(shí)現(xiàn)算法時(shí),采用32位精度,即B=32。根據(jù)m計(jì)算公式可以計(jì)算出m=11。根據(jù)輸入的θ值和公式(6),可以計(jì)算出前11個(gè)σ值。根據(jù)已經(jīng)計(jì)算出的表1可得出 。
。
再根據(jù)公式(8),(9)計(jì)算出剩下的σ值。經(jīng)過移位器,加法器最終可以得到旋轉(zhuǎn)后的向量坐標(biāo)。
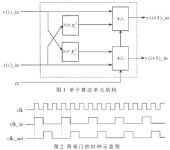
根據(jù)上述原理,需要移位40次。所以可通過反復(fù)調(diào)用圖1所示的模塊來節(jié)約資源。
對于本算法,第i+1個(gè)模塊的輸入為第i個(gè)模塊的輸出,因此,對模塊的工作時(shí)序有一定的要求。針對FPGA中寄存器資源較為豐富的特點(diǎn),在上述模塊的輸入輸出端分別加入寄存器,對輸入和輸出進(jìn)行鎖存;使用兩個(gè)進(jìn)程描述移位加法和控制信號,并且使用不同的時(shí)鐘信號作為敏感信號;為了保持整個(gè)設(shè)計(jì)的同步性,又采用了兩相門控時(shí)鐘進(jìn)行控制(如圖2所示)。圖中clk_in作為輸入寄存器的時(shí)鐘,而clk_out作為輸出寄存器的時(shí)鐘。
兩相門控時(shí)鐘生成的相關(guān)程序如下:
always @(cnt)
begin
case (cnt)
2′d0: {clk_out,clk_in}=2′b01;
2′d1: {clk_out,clk_in}=2′b10;
2′d2: {clk_out,clk_in}=2′b00;
default:{clk_out,clk_in}=2′b00;
endcase
end
4 仿真結(jié)果
本文在Quartus II環(huán)境下對利用Verilog編寫的RTL代碼進(jìn)行了綜合,使用了115個(gè)LAB。由于在一片F(xiàn)PGA芯片中可集成其他相關(guān)模塊,在系統(tǒng)設(shè)計(jì)中具有良好的應(yīng)用價(jià)值。對其進(jìn)行時(shí)序分析,本設(shè)計(jì)可達(dá)到的最大時(shí)鐘為58MHz,滿足高速系統(tǒng)設(shè)計(jì)的要求。
圖3是在Quartus II下以初始角度0度、旋轉(zhuǎn)角度30度為例的一個(gè)仿真結(jié)果,經(jīng)過118個(gè)時(shí)鐘周期后可以得到旋轉(zhuǎn)后的正弦值和余弦值。

通過理論分析及仿真實(shí)驗(yàn)結(jié)果可以看出,這種新的并行CORDIC算法在FPGA上實(shí)現(xiàn)具有可行性。算法中旋轉(zhuǎn)方向的優(yōu)先判斷,使得運(yùn)算速度大大提高。與以往在FPGA上實(shí)現(xiàn)原始的CORDIC算法相比,具有更高的速度和準(zhǔn)確性。
參考文獻(xiàn)
1 JACK E.VOLDER.The CORDIC Trigonometric Computing Technique. IRE Trans.ElectronicComputing,1959; EC-8:330~334
2 J.Walther. A unified algorithm for elementary functions.Spring Joint Computer Conf.,1971:379~385
3 Tso-Bing Juang,Shen-Fu,Ming-Yu Tsai.Para-CORDIC: Parallel CORDIC Rotation Algorithm. IEEE,2004;51(8)
4 J.Bhasker(著),孫海平(譯).Verilog 綜合實(shí)用教程.北京:清華大學(xué)出版社,2004
5 Uwe Meyer-Baese(著),劉 凌,胡永生(譯). 數(shù)字信號處理的FPGA實(shí)現(xiàn)[M]. 北京:清華大學(xué)出版社,2003:55~63