
摘 要: 基于磁阻傳感器" title="磁阻傳感器">磁阻傳感器HMC1055的帶姿態(tài)補(bǔ)償功能,開發(fā)了包含信號放大和置位" title="置位">置位/復(fù)位模塊的三維羅盤系統(tǒng)的硬件電路,并提出了干擾校正的軟件算法以適應(yīng)車內(nèi)復(fù)雜的動(dòng)態(tài)工作環(huán)境。
關(guān)鍵詞: 磁阻傳感器 HMC1055 導(dǎo)航 磁阻式羅盤
羅盤是一種重要的導(dǎo)航工具,已廣泛應(yīng)用于飛機(jī)和航海導(dǎo)航等領(lǐng)域。一般在飛機(jī)和航海導(dǎo)航系統(tǒng)中使用的慣性導(dǎo)航系統(tǒng)由于價(jià)格昂貴、結(jié)構(gòu)復(fù)雜、導(dǎo)航誤差隨時(shí)間累計(jì)等原因而不適合車載使用;傳統(tǒng)的羅盤雖然價(jià)格便宜,但不能工作于像行駛的汽車這種不穩(wěn)定的環(huán)境中。另外,傳統(tǒng)羅盤不能夠電子輸出,其信號不能集成到汽車的控制系統(tǒng)中,給實(shí)現(xiàn)基于精確導(dǎo)航的智能交通帶來了不便。
本文針對以上問題,充分考慮到汽車內(nèi)部環(huán)境的不平穩(wěn)性以及汽車發(fā)動(dòng)機(jī)等對磁場的干擾,利用磁阻傳感器設(shè)計(jì)了一種車載磁阻式電子羅盤" title="電子羅盤">電子羅盤系統(tǒng)。
1 HMC1055系列各向異性磁阻傳感器
HMC1055系列集成了HMC1051Z單軸磁阻傳感器、HMC1052雙軸磁阻傳感器和一個(gè)二軸MEMSIC MXS3334UL加速度傳感器" title="加速度傳感器">加速度傳感器。
HMC1052是一個(gè)雙軸線性磁阻傳感器,每個(gè)傳感器都有一個(gè)由鐵鎳薄膜合金組成的惠思頓橋。當(dāng)橋路加上供電電壓時(shí),傳感器將磁場強(qiáng)度轉(zhuǎn)化為電壓輸出。HMC1052包含兩個(gè)敏感元件,它們的敏感軸相互垂直,且參數(shù)相互匹配。內(nèi)部電路如圖1所示。
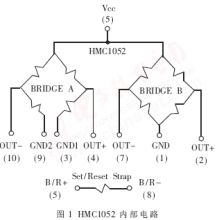
除了惠思頓電橋,HMC1052還有兩個(gè)位于芯片上的磁耦合帶:偏置帶和置位/復(fù)位帶。兩個(gè)敏感元件都有這兩個(gè)帶。置位/復(fù)位帶用于確保精度;偏置帶用于校正傳感器或偏置任何不想要的磁場。
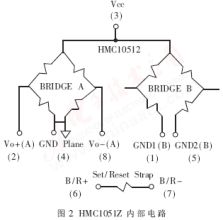
HMC1051Z為HMC1052的單軸版本,其參數(shù)與HMC1052相同。HMC10512內(nèi)部電路如圖2所示。
MEMSIC MXS3334UL是一個(gè)二軸的加速度傳感器,它能夠提供一個(gè)用數(shù)字表示的重力加速度值。當(dāng)傳感器被水平放置時(shí),兩個(gè)輸出口提供一個(gè)100Hz、50%占空比的方波。隨著傳感器的傾斜,它的輸出占空比發(fā)生變化[1]。
2 三維電子羅盤總體設(shè)計(jì)
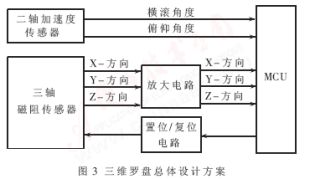
地球磁場的強(qiáng)度為0.6高斯左右,現(xiàn)有的磁阻傳感器可以很好地測量地磁場范圍內(nèi)的磁場強(qiáng)度。由于二維羅盤只能在保持水平的情況下正常工作,如果用于車輛的動(dòng)態(tài)環(huán)境中,將不可能保證其永遠(yuǎn)水平,所以在這種場合下,羅盤的可使用性大大降低。于是需要設(shè)計(jì)三維羅盤以適應(yīng)各種姿態(tài)的測量。三維電子羅盤的總體設(shè)計(jì)方案如圖3所示。
三軸" title="三軸">三軸磁阻傳感器分別從X、Y、Z 三個(gè)磁場強(qiáng)度方向輸出電壓,經(jīng)過放大電路分別輸入到三個(gè)具有A/D轉(zhuǎn)換能力的MCU端口,二軸加速度傳感器測量俯仰角度和橫滾角度,測量參數(shù)的意義如圖4所示。
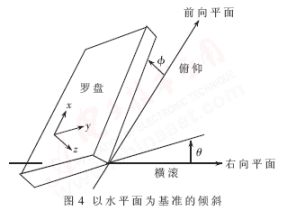
將測量出的X、Y、Z、θ、Φ代入式(1)、(2):
XH=Xcos(Φ)+Ysin(θ)sin(Φ)-Zcos(θ)sin(Φ)(1)
YH=Ycos(θ)+Zsin(θ)(2)
從而得到磁場強(qiáng)度在水平面內(nèi)的分量(XH、YH),由式(3):
方位角Φ=arctan(YH/XH)(3)
就可以計(jì)算出方位角Φ的值。
3 三維電子羅盤系統(tǒng)的硬件設(shè)計(jì)
磁阻式羅盤由五部分組成:三軸磁阻傳感器、二軸加速度傳感器、信號放大電路、置位/復(fù)位電路、MCU系統(tǒng)等。
3.1 放大電路的設(shè)計(jì)
各向異性磁阻(AMR)傳感器由惠斯頓電橋進(jìn)行工作,并且傳感器輸出電壓很小,需要放大才能進(jìn)行A/D轉(zhuǎn)換。下面以HMC1052為例進(jìn)行分析。HMC1052的靈敏度為±1.0mV/V/高斯,電橋偏置電壓值為±1mV/V。在橋路電壓3V和625毫高斯最大的磁場強(qiáng)度下,橋路偏置電壓為:
Vo f f =(3.0V)×(±1.0mV/V)=±3.0mV
最大的磁場擺幅為:
V磁場=(3.0V)×(±1.0mV/V/Guass)×(0.625Guass)=±1.875mV
因此電橋輸出的總擺幅為:
Vout =Vo f f +V磁場=(±3.0mV)+(±1.875mV)=±4.875mV
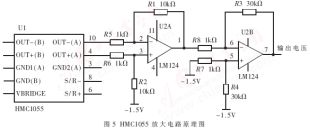
經(jīng)過上面的分析,使用雙運(yùn)算放大器來設(shè)計(jì)基本電路,將需要的電壓信號放大以進(jìn)行A/D轉(zhuǎn)換。圖5給出了一個(gè)HMC1052放大電路的典型方案。由于Vout=±4.875mV,ADC采樣在0~3V或者1.5±1.5V范圍內(nèi),這樣就允許運(yùn)算放大器調(diào)整其增益,以將±4.875mV的信號放大至±2.5V的ADC范圍內(nèi)。因此,運(yùn)算放大器的增益為:
增益=(±1.5V )/(±4.875mV)=307
這里將增益化整取值為300。
3.2 置位/復(fù)位電路的設(shè)計(jì)
當(dāng)受到強(qiáng)磁場干擾時(shí),傳感器磁化極性會受到破壞,傳感器特性也會改變。針對這一破壞性的磁場,需對傳感器敏感元件施加一個(gè)瞬態(tài)的強(qiáng)恢復(fù)磁場來恢復(fù)或保持傳感器特性。在HMC1055系列芯片上有一小電流帶,對電流帶施加置位或者復(fù)位脈沖就能夠?qū)鞲衅髦梦换蛘邚?fù)位。
置位脈沖和復(fù)位脈沖對傳感器所起的作用基本是一樣,惟一的區(qū)別是傳感器輸出的正負(fù)號改變。進(jìn)行置位或復(fù)位,需對復(fù)位置位帶施加3~4A、20~50ns的脈沖電流,置位或復(fù)位脈沖寬度為2μs。
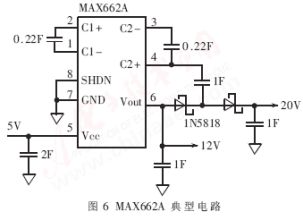
在HMC1055芯片上,置位/復(fù)位片的引腳名稱是S/R+和S/R-,沒有極性的區(qū)別,單個(gè)置位/復(fù)位帶標(biāo)準(zhǔn)阻值為2.0Ω,所以對于三軸系統(tǒng),三個(gè)金屬片串聯(lián)阻值為6.0Ω,則產(chǎn)生一個(gè)3~4A的最小脈沖驅(qū)動(dòng)一個(gè)6Ω的負(fù)載所需的供電電壓為18V~24V。由于系統(tǒng)芯片都是使用5V電源,所以需要將5V電壓升壓到20V左右,可以使用MAX662來完成。典型的電路如圖6所示。
得到需要的電壓后,設(shè)計(jì)圖騰柱式置位復(fù)位電路,如圖7所示。圖中SET和RESET可以各連接MCU的一個(gè)引腳,當(dāng)SET為高傳感器時(shí)置位;RESET為高電傳感器時(shí)復(fù)位。
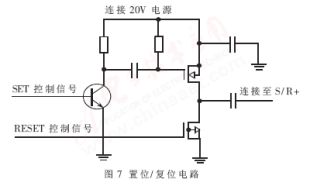
脈沖寬度會對整個(gè)電源的消耗造成直接影響,但是由于汽車內(nèi)干擾比較多,所以建議至少為2次/秒。這樣既可以保證系統(tǒng)的精度,也降低了功耗。
4 系統(tǒng)的干擾校正
由于汽車內(nèi)環(huán)境的特殊性,造成了車載羅盤周圍的干擾比較多,所以設(shè)計(jì)車載羅盤時(shí)需要考慮干擾校正問題。
干擾源可分為硬鐵影響(Hard Iron Effects)和軟鐵影響(Soft Iron Effects)。硬鐵影響源于永久磁鐵和磁化的鋼鐵對磁場引起的變化,如車內(nèi)發(fā)動(dòng)機(jī)、直流電等,這種影響恒定地附加一個(gè)磁場分量。軟鐵影響產(chǎn)生于地磁場,受軟鐵材料的影響,如當(dāng)汽車駛過一個(gè)強(qiáng)磁場區(qū)時(shí),這種影響往往是瞬時(shí)的,而且比較微弱。所以在設(shè)計(jì)車載羅盤時(shí)主要需考慮硬鐵影響對系統(tǒng)的影響[1]。
因?yàn)橛茶F影響是恒定的,所以可以采用標(biāo)定的方法消除干擾。標(biāo)定的方法為:將車載羅盤在水平面旋轉(zhuǎn)一周,記錄下X、Y兩個(gè)方向的最大和最小值(Xmax、Ymax)、(Xmin、Ymin),代入式(4)、(5)、(6)、(7)中,可以得到Xo f f 、Yo f f 。
其中,(XR、YR)為經(jīng)過校正的值,將它們帶入式(3)就可以得到方位角。
本電子羅盤的設(shè)計(jì)充分考慮了汽車內(nèi)部的不平穩(wěn)性以及磁場干擾,采用了抗干擾技術(shù),使系統(tǒng)測量精度得到了提高。由于采用了三軸設(shè)計(jì)和姿態(tài)補(bǔ)償設(shè)計(jì)方案,使羅盤處于任何姿態(tài)時(shí)均能正常使用。此外,本系統(tǒng)經(jīng)過微控制器進(jìn)行數(shù)字輸出,從而可集成于GPS定位系統(tǒng)之中。
參考文獻(xiàn)
1 HMC1055 3-AXIS COMPASS SENSOR SET [EB/OL].霍尼韋爾公司,http://www.honeywell-sensor.com.cn/prodinfo/sensor_magnetic/datasheet/hmc1055.pdf
2 AMR磁阻傳感器車輛檢測和羅盤定向的應(yīng)用 [EB/OL].霍尼韋爾公司, http://www.honeywell-sensor.com.cn/prodinfo/sensor_magnetic/applications_notes/apn02.pdf
3 用于磁阻傳感器的置位/復(fù)位脈沖電路[EB/OL].霍尼韋爾公司,http://www.honeywell-sensor.com.cn/prodinfo/sensor_magnetic/applications_notes/apn05.pdf
4 楊新勇,黃圣國.智能磁航向傳感器的研制及誤差補(bǔ)償算法分析[J].北京航空航天大學(xué)學(xué)報(bào),2004;30(3):244~248
5 林繼鵬,王 君,凌振寶等.HMC1001型磁阻式傳感器及應(yīng)用[J].傳感器技術(shù),2002;21(3):51~52
6 裴 軼,虞南方,劉奇等.各向異性磁阻傳感器的原理及其應(yīng)用[J].儀表技術(shù)與傳感器,2004;(8):26~28