基于邊緣計(jì)算的智能電能表校時(shí)方法研究[測試測量][智能電網(wǎng)]
發(fā)表于:3/20/2024 1:02:24 PM
基于SIP技術(shù)的固態(tài)硬盤電路設(shè)計(jì)[EDA與制造][工業(yè)自動(dòng)化]
發(fā)表于:3/20/2024 1:02:21 PM
一種高效能可重構(gòu)1 024位大數(shù)乘法器的設(shè)計(jì)[嵌入式技術(shù)][工業(yè)自動(dòng)化]
發(fā)表于:3/20/2024 1:02:19 PM
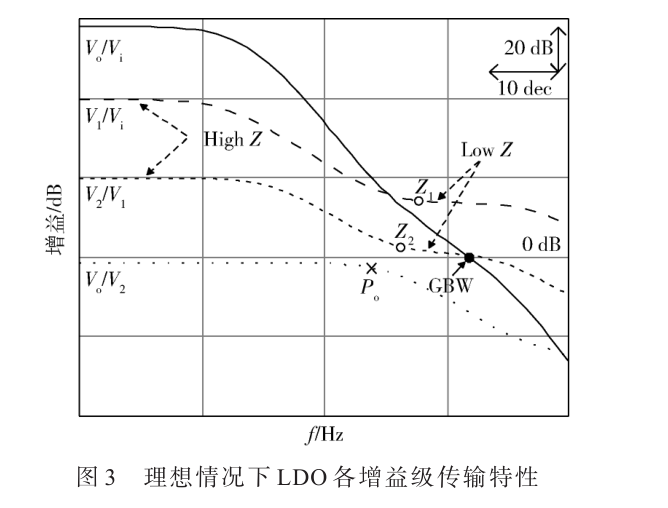
基于負(fù)載追蹤補(bǔ)償?shù)拇箅娏鱈DO設(shè)計(jì)[電源技術(shù)][工業(yè)自動(dòng)化]
發(fā)表于:3/20/2024 1:02:11 PM

全局通道注意力增強(qiáng)的毫米波圖像目標(biāo)檢測[人工智能][安防電子]
發(fā)表于:3/20/2024 1:02:09 PM

Wi-Fi7關(guān)鍵技術(shù)分析綜述[通信與網(wǎng)絡(luò)][物聯(lián)網(wǎng)]
發(fā)表于:3/20/2024 1:02:07 PM
6G關(guān)鍵技術(shù)及其面臨的挑戰(zhàn)[通信與網(wǎng)絡(luò)][5G]
發(fā)表于:3/20/2024 1:02:05 PM

基于5G網(wǎng)絡(luò)的RedCap部署方案研究[通信與網(wǎng)絡(luò)][5G]
發(fā)表于:3/20/2024 1:02:03 PM
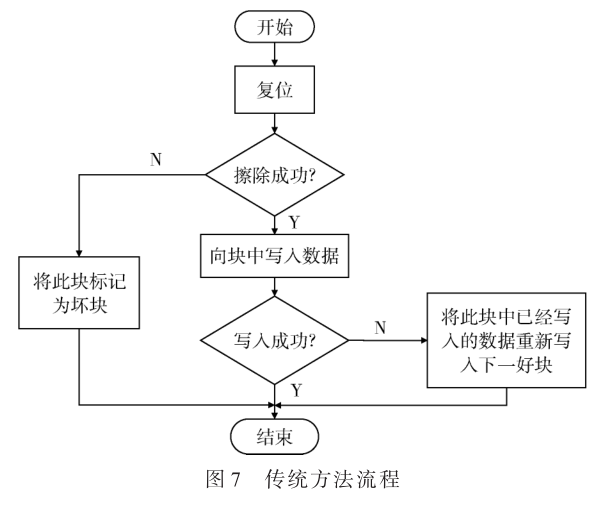
Flash陣列無效塊管理[EDA與制造][航空航天]
發(fā)表于:3/20/2024 1:02:00 PM