
摘 要: 給出了神經(jīng)網(wǎng)絡(luò)魯棒性的概念,基于系統(tǒng)辨識的BP網(wǎng)絡(luò)、RBF網(wǎng)絡(luò)和Elman網(wǎng)絡(luò)的魯棒性問題進(jìn)行了分析和研究。仿真結(jié)果表明,神經(jīng)網(wǎng)絡(luò)用于非線性系統(tǒng)辨識有其廣闊的前景。
關(guān)鍵詞: 魯棒性 神經(jīng)網(wǎng)絡(luò) 系統(tǒng)辨識
?
在控制系統(tǒng)的研究中,人們關(guān)心的最基本的問題是系統(tǒng)的穩(wěn)定性在參數(shù)變化下保持的可能性。Davison在提出干擾不變性的內(nèi)模原理時提出了系統(tǒng)結(jié)構(gòu)穩(wěn)定性的概念,這是一種基于無窮小擾動分析的魯棒性概念。在實際系統(tǒng)中參數(shù)既不能視為不變,也不能僅具有無窮小擾動。系統(tǒng)工作環(huán)境的變化,模型的不精確性、降階近似、非線性的線性化等都可化成一種參數(shù)擾動。有時系統(tǒng)受控對象可能有幾個不同的工作狀態(tài)。當(dāng)用同一控制器來控制時,人們也把不同工作狀態(tài)所對應(yīng)的參數(shù)差別視為一種擾動,這種參數(shù)的變化只能被視為有界擾動。現(xiàn)代魯棒性分析的最重要的特點就是要求討論在有界擾動下系統(tǒng)性能保持的能力。
常系數(shù)線性系統(tǒng)魯棒分析與氯控制正取得豐富的成果,但非線性系統(tǒng)的魯棒性研究還是十分必要的。神經(jīng)網(wǎng)絡(luò)的非線性系統(tǒng)變換為非線性系統(tǒng)尤其是工業(yè)過程系統(tǒng)的辨識與控制提供了有效的途徑。本文針對三種用于工業(yè)過程控制的典型神經(jīng)網(wǎng)絡(luò)(BP、Elman、RBF網(wǎng)絡(luò))算法的魯棒性,進(jìn)行了分析、比較和研究,最后給出了仿真結(jié)果。
1 三種神經(jīng)網(wǎng)絡(luò)的魯棒性分析
有的文獻(xiàn)將神經(jīng)網(wǎng)絡(luò)的魯棒性與泛化能力混為一談,比如將采用雙BP算法,使網(wǎng)絡(luò)輸入值變化很小時,網(wǎng)絡(luò)輸出值基本不變看成是網(wǎng)絡(luò)的泛化性。所以首先要明確什么是神經(jīng)網(wǎng)絡(luò)的魯棒性。對于前向無反饋神經(jīng)網(wǎng)絡(luò)而言,神經(jīng)網(wǎng)絡(luò)的魯棒性是指當(dāng)輸入信息或神經(jīng)網(wǎng)絡(luò)發(fā)生有限攝動時,神經(jīng)網(wǎng)絡(luò)仍能保持正常的輸入—輸出關(guān)系的特性;對于反饋神經(jīng)網(wǎng)絡(luò)而言,神經(jīng)網(wǎng)絡(luò)的魯棒性是指當(dāng)輸入信息或神經(jīng)網(wǎng)絡(luò)發(fā)生有限攝動時,神經(jīng)網(wǎng)絡(luò)仍能保持穩(wěn)定的輸入—輸出關(guān)系的特性。
神經(jīng)網(wǎng)絡(luò)的魯棒性依賴于神經(jīng)網(wǎng)絡(luò)參數(shù)位置和它附近系統(tǒng)誤差曲面的具體形態(tài)。神經(jīng)網(wǎng)絡(luò)參數(shù)設(shè)計在極值點附近而其附近的形態(tài)誤差曲面又比較平緩時,網(wǎng)絡(luò)的魯棒性就好,否則魯棒性就差。使系統(tǒng)誤差曲面在設(shè)計處平緩的主要方法是選用平滑的變換函數(shù),但平滑的變換函數(shù)又不利于提高網(wǎng)絡(luò)的學(xué)習(xí)速度。BP網(wǎng)絡(luò)、Elman網(wǎng)絡(luò)、RBF網(wǎng)絡(luò)的變換函數(shù)都是平滑的,所以問題的關(guān)鍵就是網(wǎng)絡(luò)參數(shù)能否在極值點附近。
下面通過一個動態(tài)系統(tǒng)的實例進(jìn)行分析。
動態(tài)系統(tǒng)的函數(shù)映射關(guān)系式為:
圖1給出了系統(tǒng)的輸入—輸出延遲—輸出的三維圖,把輸入和輸出延遲都作為自變量時,就為利用靜態(tài)網(wǎng)絡(luò)辨識靜態(tài)系統(tǒng)提供了可能性。

該動態(tài)系統(tǒng)的函數(shù)映射關(guān)系實際是基于NARMA模型的函數(shù)形式,因此可以把系統(tǒng)輸入、輸出和它們的延遲值同時作為靜態(tài)神經(jīng)網(wǎng)絡(luò)的輸入,從而使得靜態(tài)神經(jīng)網(wǎng)絡(luò)能映射NARMA模型類的動態(tài)系統(tǒng)。NARMA模型是一種統(tǒng)一的有限可實現(xiàn)非線性系統(tǒng)的表達(dá)式。
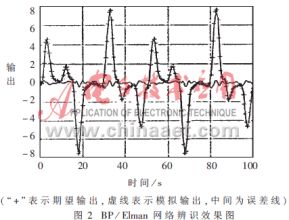
圖2、圖3分別為BP/Elman、RBF網(wǎng)絡(luò)辨識系統(tǒng)的效果圖。

2 仿真結(jié)果
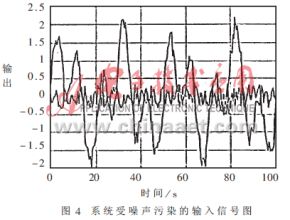
在上述所研究的系統(tǒng)中的輸入上附加一隨機(jī)量,如圖4所示。它類似于工業(yè)過程中的噪聲污染。
 ?
?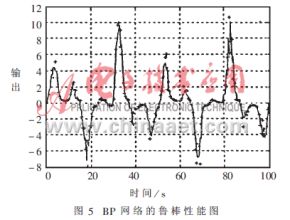
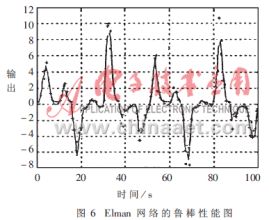
通過訓(xùn)練好的神經(jīng)網(wǎng)絡(luò)來模擬輸出,并與系統(tǒng)的實際輸出比較。從圖5、圖6、圖7中可明顯看出BP網(wǎng)絡(luò)、Elman網(wǎng)絡(luò)的模擬輸出比較光滑,沒有出現(xiàn)大的躍變,且與實際輸出差值不大,而RBF網(wǎng)絡(luò)與前者的最大差別是會出現(xiàn)大幅度的躍變。這是由于噪聲的影響,受噪聲污染的輸入偏離了訓(xùn)練樣本集中的輸入,從而偏離了徑向基函數(shù)的中心,這樣其輸出與真實值相差就很大。
 ?
?
從仿真結(jié)果中可知:RBF網(wǎng)絡(luò)的最大優(yōu)點是收斂速度快、逼近精度高、訓(xùn)練結(jié)果唯一;而最大的不足是泛化性能較差,所以當(dāng)其輸入偏離訓(xùn)練樣本集時,系統(tǒng)表現(xiàn)出的魯棒性就會很差。但它在時變快、學(xué)習(xí)樣本集可基本覆蓋整個系統(tǒng)的狀態(tài)的情況下具有明顯的優(yōu)越性。所以針對系統(tǒng)的辨識與控制研究神經(jīng)網(wǎng)絡(luò)的魯棒性是非常必要的。
參考文獻(xiàn)
1 黃 琳,王 龍,于年才.系統(tǒng)魯棒性的若干問題——背景、現(xiàn)狀與挑戰(zhàn).控制理論及應(yīng)用,1991;8(1):11~12
2 張邦禮,李銀國,曹長修.非線性系統(tǒng)神經(jīng)網(wǎng)絡(luò)辨識的魯棒BP算法.控制與決策,1996;11(1):26~27